ตัวควบคุมความเร็วมอเตอร์ 12V DC ตัวควบคุม PWM อันทรงพลัง หลักการทำงานของตัวควบคุมทรานซิสเตอร์
เพื่อเพิ่มและลดความเร็วการหมุนของเพลาได้อย่างราบรื่นจึงมีอุปกรณ์พิเศษ - ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V การทำงานที่เสถียร แรงดันไฟฟ้าไม่หยุดชะงัก อายุการใช้งานยาวนาน - ข้อดีของการใช้ตัวควบคุมความเร็วรอบเครื่องยนต์ 220, 12 และ 24 โวลต์
- พื้นที่ใช้งาน
- การเลือกอุปกรณ์
- ถ้าอุปกรณ์
- ประเภทของอุปกรณ์
- อุปกรณ์ไทรแอก
ทำไมคุณถึงต้องใช้ตัวแปลงความถี่?
หน้าที่ของตัวควบคุมคือการกลับแรงดันไฟฟ้า 12, 24 โวลต์ เพื่อให้มั่นใจว่าการสตาร์ทและหยุดเป็นไปอย่างราบรื่นโดยใช้การปรับความกว้างพัลส์
ตัวควบคุมความเร็วรวมอยู่ในโครงสร้างของอุปกรณ์หลายชนิดเนื่องจากรับประกันความแม่นยำของการควบคุมไฟฟ้า สิ่งนี้ช่วยให้คุณปรับความเร็วได้ตามปริมาณที่ต้องการ
พื้นที่ใช้งาน
ตัวควบคุมความเร็วมอเตอร์กระแสตรงใช้ในงานอุตสาหกรรมและในประเทศจำนวนมาก ตัวอย่างเช่น:
- เครื่องทำความร้อนที่ซับซ้อน
- อุปกรณ์ขับเคลื่อน
- เครื่องเชื่อม
- เตาอบไฟฟ้า
- เครื่องดูดฝุ่น;
- จักรเย็บผ้า;
- เครื่องซักผ้า.
การเลือกอุปกรณ์
![]() ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
- ตัวควบคุมเวกเตอร์เป็นเรื่องปกติสำหรับมอเตอร์คอมมิวเตเตอร์ แต่ตัวควบคุมแบบสเกลาร์มีความน่าเชื่อถือมากกว่า
- เกณฑ์การคัดเลือกที่สำคัญคืออำนาจ ต้องสอดคล้องกับที่ได้รับอนุญาตในหน่วยที่ใช้ จะดีกว่าเพื่อให้ระบบทำงานได้อย่างปลอดภัย
- แรงดันไฟฟ้าจะต้องอยู่ในช่วงกว้างที่ยอมรับได้
- วัตถุประสงค์หลักของตัวควบคุมคือการแปลงความถี่ ดังนั้นจึงต้องเลือกแง่มุมนี้ตามข้อกำหนดทางเทคนิค
- คุณต้องใส่ใจกับอายุการใช้งานขนาดจำนวนอินพุตด้วย
ถ้าอุปกรณ์
- ตัวควบคุมธรรมชาติของมอเตอร์ AC;
- หน่วยไดรฟ์;
- องค์ประกอบเพิ่มเติม
แผนภาพวงจรของตัวควบคุมความเร็วเครื่องยนต์ 12 V แสดงในรูป ปรับความเร็วโดยใช้โพเทนชิออมิเตอร์ หากรับพัลส์ที่มีความถี่ 8 kHz ที่อินพุต แรงดันไฟฟ้าจะเท่ากับ 12 โวลต์
สามารถซื้ออุปกรณ์ได้ที่จุดขายเฉพาะหรือทำเองก็ได้

เมื่อสตาร์ทมอเตอร์สามเฟสที่กำลังเต็ม กระแสจะถูกส่ง การกระทำซ้ำประมาณ 7 ครั้ง กระแสไฟฟ้าทำให้ขดลวดมอเตอร์โค้งงอ ทำให้เกิดความร้อนเป็นระยะเวลานาน คอนเวอร์เตอร์คืออินเวอร์เตอร์ที่ให้การแปลงพลังงาน แรงดันไฟฟ้าเข้าสู่ตัวควบคุมโดยที่ 220 โวลต์จะถูกแก้ไขโดยใช้ไดโอดที่อยู่ที่อินพุต จากนั้นกระแสจะถูกกรองผ่านตัวเก็บประจุ 2 ตัว PWM ถูกสร้างขึ้น จากนั้นสัญญาณพัลส์จะถูกส่งจากขดลวดมอเตอร์ไปยังไซนัสอยด์เฉพาะ
มีอุปกรณ์สากล 12V สำหรับมอเตอร์แบบไร้แปรงถ่าน
![]()
เพื่อประหยัดค่าไฟฟ้า ผู้อ่านของเราขอแนะนำกล่องประหยัดไฟ การชำระเงินรายเดือนจะน้อยกว่าก่อนใช้โปรแกรมประหยัด 30-50% โดยจะลบส่วนประกอบที่เกิดปฏิกิริยาออกจากเครือข่าย ส่งผลให้โหลดลดลง และเป็นผลให้สิ้นเปลืองกระแสไฟด้วย เครื่องใช้ไฟฟ้ากินไฟน้อยลงและต้นทุนก็ลดลง
วงจรประกอบด้วยสองส่วน - ตรรกะและกำลัง ไมโครคอนโทรลเลอร์ตั้งอยู่บนชิป รูปแบบนี้เป็นเรื่องปกติสำหรับเครื่องยนต์ที่ทรงพลัง ความพิเศษของเรกูเลเตอร์อยู่ที่การใช้งานกับเครื่องยนต์ประเภทต่างๆ วงจรจ่ายไฟแยกกัน ไดรเวอร์หลักต้องใช้ไฟ 12V
ประเภทของอุปกรณ์
อุปกรณ์ไทรแอก
อุปกรณ์ Triac ใช้เพื่อควบคุมแสงสว่าง กำลังขององค์ประกอบความร้อน และความเร็วในการหมุน
 วงจรควบคุมที่ใช้ triac มีชิ้นส่วนขั้นต่ำดังแสดงในรูป โดยที่ C1 เป็นตัวเก็บประจุ R1 เป็นตัวต้านทานตัวแรก R2 เป็นตัวต้านทานตัวที่สอง
วงจรควบคุมที่ใช้ triac มีชิ้นส่วนขั้นต่ำดังแสดงในรูป โดยที่ C1 เป็นตัวเก็บประจุ R1 เป็นตัวต้านทานตัวแรก R2 เป็นตัวต้านทานตัวที่สอง
เมื่อใช้ตัวแปลง พลังงานจะถูกควบคุมโดยการเปลี่ยนเวลาของไทรแอคแบบเปิด หากปิดอยู่ ตัวเก็บประจุจะถูกชาร์จโดยโหลดและตัวต้านทาน ตัวต้านทานตัวหนึ่งควบคุมปริมาณกระแสไฟฟ้า และตัวที่สองควบคุมอัตราการชาร์จ
เมื่อตัวเก็บประจุถึงเกณฑ์แรงดันไฟฟ้าสูงสุดที่ 12V หรือ 24V สวิตช์จะทำงาน ไทรแอกจะเข้าสู่สถานะเปิด เมื่อแรงดันไฟหลักผ่านศูนย์ ไทรแอกจะถูกล็อค จากนั้นตัวเก็บประจุจะมีประจุลบ
ตัวแปลงบนกุญแจอิเล็กทรอนิกส์
ตัวควบคุมไทริสเตอร์ทั่วไปที่มีวงจรการทำงานที่เรียบง่าย

ไทริสเตอร์ทำงานในเครือข่ายกระแสสลับ
ประเภทที่แยกจากกันคือตัวปรับแรงดันไฟฟ้ากระแสสลับ โคลงประกอบด้วยหม้อแปลงที่มีขดลวดจำนวนมาก


ไปยังแหล่งจ่ายแรงดันไฟฟ้า 24 โวลต์ หลักการทำงานคือการชาร์จตัวเก็บประจุและไทริสเตอร์ที่ถูกล็อค และเมื่อตัวเก็บประจุถึงแรงดันไฟฟ้า ไทริสเตอร์จะส่งกระแสไปที่โหลด
กระบวนการสัญญาณตามสัดส่วน
สัญญาณมาถึงการป้อนกลับแบบฟอร์มอินพุตของระบบ มาดูอย่างใกล้ชิดโดยใช้ไมโครวงจร

ชิป TDA 1085 ดังภาพด้านบนให้การควบคุมป้อนกลับของมอเตอร์ 12V, 24V โดยไม่สูญเสียพลังงาน จำเป็นต้องมีเครื่องวัดวามเร็วซึ่งจะส่งข้อเสนอแนะจากเครื่องยนต์ไปยังแผงควบคุม สัญญาณเซ็นเซอร์รักษาเสถียรภาพไปที่วงจรไมโครซึ่งส่งงานไปยังองค์ประกอบกำลัง - เพื่อเพิ่มแรงดันไฟฟ้าให้กับมอเตอร์ เมื่อเพลาถูกโหลด บอร์ดจะเพิ่มแรงดันไฟฟ้าและกำลังเพิ่มขึ้น เมื่อปล่อยเพลา ความตึงจะลดลง การปฏิวัติจะคงที่ แต่แรงบิดของกำลังจะไม่เปลี่ยนแปลง ความถี่ถูกควบคุมในช่วงกว้าง มีการติดตั้งมอเตอร์ขนาด 12, 24 โวลต์ในเครื่องซักผ้า
ด้วยมือของคุณเองคุณสามารถสร้างอุปกรณ์สำหรับเครื่องบด, เครื่องกลึงไม้, เครื่องเหลา, เครื่องผสมคอนกรีต, เครื่องตัดฟาง, เครื่องตัดหญ้า, เครื่องแยกไม้และอื่น ๆ อีกมากมาย
 ตัวควบคุมทางอุตสาหกรรมซึ่งประกอบด้วยตัวควบคุม 12, 24 โวลต์เต็มไปด้วยเรซิน ดังนั้นจึงไม่สามารถซ่อมแซมได้ ดังนั้นอุปกรณ์ 12V มักจะทำแยกกัน ตัวเลือกง่าย ๆ โดยใช้ชิป U2008B คอนโทรลเลอร์ใช้การตอบรับปัจจุบันหรือซอฟต์สตาร์ท หากใช้อย่างหลัง จำเป็นต้องมีองค์ประกอบ C1, R4 ไม่จำเป็นต้องใช้จัมเปอร์ X1 แต่จะมีการป้อนกลับในทางกลับกัน
ตัวควบคุมทางอุตสาหกรรมซึ่งประกอบด้วยตัวควบคุม 12, 24 โวลต์เต็มไปด้วยเรซิน ดังนั้นจึงไม่สามารถซ่อมแซมได้ ดังนั้นอุปกรณ์ 12V มักจะทำแยกกัน ตัวเลือกง่าย ๆ โดยใช้ชิป U2008B คอนโทรลเลอร์ใช้การตอบรับปัจจุบันหรือซอฟต์สตาร์ท หากใช้อย่างหลัง จำเป็นต้องมีองค์ประกอบ C1, R4 ไม่จำเป็นต้องใช้จัมเปอร์ X1 แต่จะมีการป้อนกลับในทางกลับกัน
เมื่อประกอบตัวควบคุม ให้เลือกตัวต้านทานที่เหมาะสม เนื่องจากตัวต้านทานขนาดใหญ่อาจมีการกระตุกที่จุดเริ่มต้น และด้วยตัวต้านทานขนาดเล็ก การชดเชยจะไม่เพียงพอ
สำคัญ! เมื่อทำการปรับตัวควบคุมพลังงาน คุณต้องจำไว้ว่าทุกส่วนของอุปกรณ์เชื่อมต่อกับเครือข่าย AC ดังนั้นจึงต้องปฏิบัติตามข้อควรระวังด้านความปลอดภัย!
ตัวควบคุมความเร็วสำหรับมอเตอร์ 24, 12 โวลต์แบบเฟสเดียวและสามเฟสเป็นอุปกรณ์ที่ใช้งานได้และมีคุณค่าทั้งในชีวิตประจำวันและในอุตสาหกรรม
ด้วยกลไกง่ายๆ จะสะดวกในการติดตั้งตัวควบคุมกระแสแบบอะนาล็อก ตัวอย่างเช่นสามารถเปลี่ยนความเร็วการหมุนของเพลามอเตอร์ได้ จากด้านเทคนิค การใช้ตัวควบคุมดังกล่าวทำได้ง่าย (คุณจะต้องติดตั้งทรานซิสเตอร์ตัวเดียว) เหมาะสำหรับการปรับความเร็วอิสระของมอเตอร์ในหุ่นยนต์และอุปกรณ์จ่ายไฟ ประเภทของหน่วยงานกำกับดูแลที่พบบ่อยที่สุดคือช่องทางเดียวและสองช่องทาง
วิดีโอหมายเลข 1ตัวควบคุมช่องสัญญาณเดียวในการทำงาน เปลี่ยนความเร็วในการหมุนของเพลามอเตอร์โดยการหมุนปุ่มตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 2 การเพิ่มความเร็วในการหมุนของเพลามอเตอร์เมื่อใช้งานตัวควบคุมช่องสัญญาณเดียว การเพิ่มจำนวนรอบจากค่าต่ำสุดไปเป็นค่าสูงสุดเมื่อหมุนปุ่มหมุนตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 3ตัวควบคุมสองช่องสัญญาณกำลังทำงาน การตั้งค่าความเร็วแรงบิดของเพลามอเตอร์โดยอิสระโดยอาศัยตัวต้านทานแบบทริมมิง
วิดีโอหมายเลข 4 วัดแรงดันไฟฟ้าที่เอาต์พุตของตัวควบคุมด้วยมัลติมิเตอร์แบบดิจิตอล ค่าผลลัพธ์จะเท่ากับแรงดันไฟฟ้าของแบตเตอรี่ซึ่งลบออกแล้ว 0.6 โวลต์ (ความแตกต่างเกิดขึ้นเนื่องจากแรงดันไฟฟ้าตกคร่อมทางแยกทรานซิสเตอร์) เมื่อใช้แบตเตอรี่ขนาด 9.55 โวลต์ จะมีการบันทึกการเปลี่ยนแปลงจาก 0 เป็น 8.9 โวลต์
หน้าที่และลักษณะสำคัญ
กระแสโหลดของหน่วยงานกำกับดูแลช่องเดียว (ภาพถ่าย 1) และสองช่อง (ภาพถ่าย 2) ไม่เกิน 1.5 A ดังนั้นเพื่อเพิ่มความสามารถในการรับน้ำหนักทรานซิสเตอร์ KT815A จะถูกแทนที่ด้วย KT972A หมายเลขพินสำหรับทรานซิสเตอร์เหล่านี้จะเหมือนกัน (e-k-b) แต่รุ่น KT972A ใช้งานได้กระแสสูงสุด 4A
ตัวควบคุมมอเตอร์ช่องเดียว
อุปกรณ์ควบคุมมอเตอร์หนึ่งตัวซึ่งขับเคลื่อนด้วยแรงดันไฟฟ้าในช่วง 2 ถึง 12 โวลต์
การออกแบบอุปกรณ์
องค์ประกอบการออกแบบหลักของตัวควบคุมแสดงอยู่ในรูปภาพ 3. อุปกรณ์ประกอบด้วยห้าองค์ประกอบ: ตัวต้านทานความต้านทานแบบแปรผันสองตัวที่มีความต้านทาน 10 kOhm (หมายเลข 1) และ 1 kOhm (หมายเลข 2) ทรานซิสเตอร์รุ่น KT815A (หมายเลข 3) สกรูสองส่วนคู่หนึ่ง เทอร์มินัลบล็อกสำหรับเอาต์พุตต่อมอเตอร์ (หมายเลข 4) และอินพุตสำหรับต่อแบตเตอรี่ (หมายเลข 5)
หมายเหตุ 1. ไม่จำเป็นต้องติดตั้งแผงขั้วต่อสกรู คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
ขั้นตอนการทำงานของตัวควบคุมมอเตอร์อธิบายไว้ในแผนภาพไฟฟ้า (รูปที่ 1) เมื่อคำนึงถึงขั้วไฟฟ้าแล้ว ขั้วต่อ XT1 จะจ่ายแรงดันไฟฟ้าคงที่ หลอดไฟหรือมอเตอร์เชื่อมต่อกับขั้วต่อ XT2 ตัวต้านทานแบบแปรผัน R1 เปิดอยู่ที่อินพุต การหมุนปุ่มจะเปลี่ยนศักย์ไฟฟ้าที่เอาต์พุตตรงกลางซึ่งตรงข้ามกับค่าลบของแบตเตอรี่ ผ่านตัวจำกัดกระแส R2 เอาต์พุตตรงกลางจะเชื่อมต่อกับเทอร์มินัลฐานของทรานซิสเตอร์ VT1 ในกรณีนี้ ทรานซิสเตอร์จะเปิดตามวงจรกระแสปกติ ศักย์ไฟฟ้าเชิงบวกที่เอาท์พุตฐานจะเพิ่มขึ้นเมื่อเอาท์พุตตรงกลางเคลื่อนขึ้นจากการหมุนอย่างราบรื่นของปุ่มตัวต้านทานปรับค่าได้ มีกระแสเพิ่มขึ้นซึ่งเกิดจากการลดความต้านทานของจุดเชื่อมต่อตัวสะสมและตัวปล่อยในทรานซิสเตอร์ VT1 ศักยภาพจะลดลงหากสถานการณ์กลับด้าน
 แผนภาพวงจรไฟฟ้า
แผนภาพวงจรไฟฟ้า วัสดุและรายละเอียด
ต้องใช้แผงวงจรพิมพ์ขนาด 20x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่ง (ความหนาที่อนุญาต 1-1.5 มม.) ตารางที่ 1 แสดงรายการส่วนประกอบวิทยุ
โน้ต 2. ตัวต้านทานแบบแปรผันที่จำเป็นสำหรับอุปกรณ์สามารถผลิตได้ทุกประเภท สิ่งสำคัญคือต้องสังเกตค่าความต้านทานปัจจุบันที่ระบุไว้ในตารางที่ 1
หมายเหตุ 3. ในการควบคุมกระแสที่สูงกว่า 1.5A ทรานซิสเตอร์ KT815G จะถูกแทนที่ด้วย KT972A ที่ทรงพลังกว่า (ด้วยกระแสสูงสุด 4A) ในกรณีนี้ไม่จำเป็นต้องเปลี่ยนการออกแบบแผงวงจรพิมพ์เนื่องจากการกระจายพินสำหรับทรานซิสเตอร์ทั้งสองจะเหมือนกัน
กระบวนการสร้าง
สำหรับงานต่อไป คุณต้องดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความ แตกไฟล์แล้วพิมพ์ แบบควบคุม (ไฟล์) จะพิมพ์บนกระดาษมัน และแบบติดตั้ง (ไฟล์) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
ถัดไป ภาพวาดของแผงวงจร (หมายเลข 1 ในภาพที่ 4) ติดกาวเข้ากับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ (หมายเลข 2 ในภาพที่ 4) จำเป็นต้องเจาะรู (หมายเลข 3 ในภาพที่ 14) บนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน ภาพที่ 5 แสดง pinout ของทรานซิสเตอร์ KT815 
อินพุตและเอาต์พุตของขั้วต่อเทอร์มินัลบล็อกจะมีเครื่องหมายสีขาว แหล่งจ่ายแรงดันไฟฟ้าเชื่อมต่อกับแผงขั้วต่อผ่านคลิป ตัวควบคุมช่องสัญญาณเดียวที่ประกอบอย่างสมบูรณ์แสดงอยู่ในรูปภาพ เชื่อมต่อแหล่งพลังงาน (แบตเตอรี่ 9 โวลต์) ในขั้นตอนสุดท้ายของการประกอบ ตอนนี้คุณสามารถปรับความเร็วการหมุนของเพลาได้โดยใช้มอเตอร์ ในการทำเช่นนี้คุณจะต้องหมุนปุ่มปรับตัวต้านทานแบบแปรผันได้อย่างราบรื่น
ในการทดสอบอุปกรณ์คุณจะต้องพิมพ์ภาพวาดของดิสก์จากไฟล์เก็บถาวร ถัดไปคุณต้องวางภาพวาดนี้ (หมายเลข 1) ลงบนกระดาษแข็งหนาและบาง (หมายเลข 2) จากนั้นใช้กรรไกรตัดแผ่นดิสก์ออก (หมายเลข 3)
ชิ้นงานที่ได้จะถูกพลิกกลับ (หมายเลข 1) และติดเทปพันสายไฟสีดำสี่เหลี่ยม (หมายเลข 2) ไว้ที่กึ่งกลางเพื่อให้พื้นผิวของเพลามอเตอร์ติดกับจานได้ดีขึ้น คุณต้องทำหลุม (หมายเลข 3) ดังที่แสดงในภาพ จากนั้นจึงติดตั้งดิสก์บนเพลามอเตอร์และเริ่มการทดสอบได้ ตัวควบคุมมอเตอร์ช่องเดียวพร้อมแล้ว!
ตัวควบคุมมอเตอร์สองช่องสัญญาณ
ใช้เพื่อควบคุมมอเตอร์คู่พร้อมกันอย่างอิสระ จ่ายไฟจากแรงดันไฟฟ้าตั้งแต่ 2 ถึง 12 โวลต์ กระแสโหลดได้รับการจัดอันดับสูงสุด 1.5A ต่อช่องสัญญาณ
การออกแบบอุปกรณ์
ส่วนประกอบหลักของการออกแบบแสดงในภาพที่ 10 และประกอบด้วย: ตัวต้านทานการตัดแต่งสองตัวสำหรับการปรับช่องที่ 2 (หมายเลข 1) และช่องที่ 1 (หมายเลข 2) บล็อกเทอร์มินัลสกรูสองส่วนสามตัวสำหรับเอาต์พุตไปที่ช่องที่ 2 มอเตอร์ (หมายเลข 3) สำหรับเอาต์พุตไปยังมอเตอร์ตัวที่ 1 (หมายเลข 4) และสำหรับอินพุต (หมายเลข 5)
หมายเหตุ:1 การติดตั้งแผงขั้วต่อสกรูเป็นทางเลือก คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
วงจรของตัวควบคุมสองช่องสัญญาณนั้นเหมือนกับวงจรไฟฟ้าของตัวควบคุมช่องสัญญาณเดียว ประกอบด้วยสองส่วน (รูปที่ 2) ข้อแตกต่างที่สำคัญ: ตัวต้านทานความต้านทานแบบแปรผันจะถูกแทนที่ด้วยตัวต้านทานแบบทริมเมอร์ ความเร็วการหมุนของเพลาจะถูกตั้งค่าไว้ล่วงหน้า 
โน้ต 2. เพื่อปรับความเร็วในการหมุนของมอเตอร์อย่างรวดเร็ว ตัวต้านทานทริมเมอร์จะถูกแทนที่ด้วยลวดยึดที่มีตัวต้านทานความต้านทานแบบแปรผันพร้อมค่าความต้านทานที่ระบุในแผนภาพ
วัสดุและรายละเอียด
คุณจะต้องมีแผงวงจรพิมพ์ขนาด 30x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่งมีความหนา 1-1.5 มม. ตารางที่ 2 แสดงรายการส่วนประกอบวิทยุ
กระบวนการสร้าง
หลังจากดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความแล้ว คุณจะต้องแตกไฟล์และพิมพ์ออกมา แบบร่างตัวควบคุมสำหรับการถ่ายเทความร้อน (ไฟล์ termo2) จะพิมพ์บนกระดาษมัน และแบบร่างการติดตั้ง (ไฟล์ montag2) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
การวาดแผงวงจรจะติดอยู่กับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ สร้างรูบนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน กำลังปักหมุดทรานซิสเตอร์ KT815 ในการตรวจสอบ คุณต้องเชื่อมต่ออินพุต 1 และ 2 ชั่วคราวด้วยสายยึด
อินพุตใดๆ เชื่อมต่อกับขั้วของแหล่งพลังงาน (ตัวอย่างแสดงแบตเตอรี่ขนาด 9 โวลต์) ขั้วลบของแหล่งจ่ายไฟติดอยู่ที่กึ่งกลางของแผงขั้วต่อ สิ่งสำคัญที่ต้องจำ: สายสีดำคือ “-” และสายสีแดงคือ “+”
มอเตอร์จะต้องเชื่อมต่อกับแผงขั้วต่อสองตัว และต้องตั้งค่าความเร็วที่ต้องการด้วย หลังจากการทดสอบสำเร็จ คุณจะต้องลบการเชื่อมต่อชั่วคราวของอินพุตและติดตั้งอุปกรณ์บนโมเดลหุ่นยนต์ ตัวควบคุมมอเตอร์สองช่องสัญญาณพร้อมแล้ว!
มีการนำเสนอไดอะแกรมและภาพวาดที่จำเป็นสำหรับงานนี้ ตัวส่งของทรานซิสเตอร์จะมีลูกศรสีแดงกำกับไว้
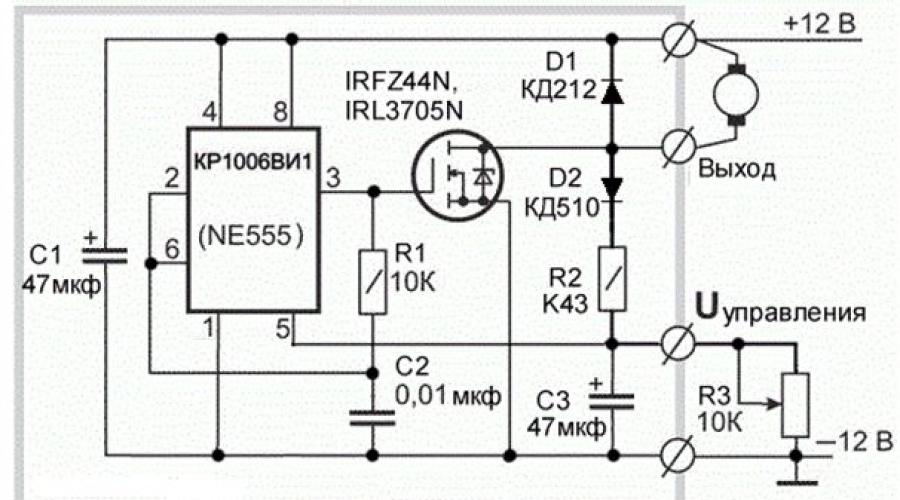
วงจร DIY นี้สามารถใช้เป็นตัวควบคุมความเร็วสำหรับมอเตอร์ DC 12V ที่มีอัตรากระแสไฟสูงถึง 5A หรือใช้เป็นเครื่องหรี่ไฟสำหรับหลอดฮาโลเจน 12V และหลอด LED สูงถึง 50W การควบคุมดำเนินการโดยใช้การปรับความกว้างพัลส์ (PWM) ที่อัตราการเกิดซ้ำของพัลส์ประมาณ 200 เฮิรตซ์ โดยปกติแล้ว ความถี่สามารถเปลี่ยนแปลงได้หากจำเป็น โดยเลือกเพื่อความเสถียรและประสิทธิภาพสูงสุด
โครงสร้างเหล่านี้ส่วนใหญ่ประกอบขึ้นตามรูปแบบที่ง่ายกว่ามาก เรานำเสนอเวอร์ชันขั้นสูงเพิ่มเติมซึ่งใช้ตัวจับเวลา 7555 ไดรเวอร์ทรานซิสเตอร์แบบไบโพลาร์ และ MOSFET อันทรงพลัง การออกแบบนี้ให้การควบคุมความเร็วที่ดีขึ้นและทำงานในช่วงโหลดที่กว้าง นี่เป็นรูปแบบที่มีประสิทธิภาพมากและต้นทุนของชิ้นส่วนเมื่อซื้อเพื่อประกอบเองค่อนข้างต่ำ
วงจรควบคุม PWM สำหรับมอเตอร์ 12 V
วงจรใช้ตัวจับเวลา 7555 เพื่อสร้างความกว้างพัลส์ที่แปรผันได้ประมาณ 200 Hz ควบคุมทรานซิสเตอร์ Q3 (ผ่านทรานซิสเตอร์ Q1 - Q2) ซึ่งควบคุมความเร็วของมอเตอร์ไฟฟ้าหรือหลอดไฟ
![]()
![]()
มีการใช้งานหลายอย่างสำหรับวงจรนี้ที่จะใช้พลังงานจาก 12V: มอเตอร์ไฟฟ้า พัดลม หรือโคมไฟ สามารถใช้ในรถยนต์ เรือ และยานพาหนะไฟฟ้า ในรถไฟจำลองและอื่นๆ
![]()
สามารถเชื่อมต่อหลอดไฟ LED 12 V เช่น แถบ LED ได้ที่นี่อย่างปลอดภัย ทุกคนรู้ดีว่าหลอดไฟ LED มีประสิทธิภาพมากกว่าหลอดฮาโลเจนหรือหลอดไส้และมีอายุการใช้งานนานกว่ามาก และหากจำเป็นให้จ่ายไฟให้กับคอนโทรลเลอร์ PWM ตั้งแต่ 24 โวลต์ขึ้นไปเนื่องจากตัวไมโครวงจรเองที่มีสเตจบัฟเฟอร์นั้นมีตัวปรับกำลังไฟ
 ตัวควบคุมความเร็วมอเตอร์เอซี
ตัวควบคุมความเร็วมอเตอร์เอซี
![]() ตัวควบคุม PWM 12 โวลต์
ตัวควบคุม PWM 12 โวลต์
 ไดร์เวอร์ตัวควบคุม Half Bridge DC
ไดร์เวอร์ตัวควบคุม Half Bridge DC
 วงจรควบคุมความเร็วสว่านขนาดเล็ก
วงจรควบคุมความเร็วสว่านขนาดเล็ก
การควบคุมความเร็วรอบเครื่องยนต์ด้วยการถอยหลัง
สวัสดีทุกคน นักวิทยุสมัครเล่นหลายคนเช่นฉันมีงานอดิเรกมากกว่าหนึ่งอย่าง แต่มีหลายอย่าง นอกจากการออกแบบอุปกรณ์อิเล็กทรอนิกส์แล้ว ฉันยังถ่ายภาพ ถ่ายวิดีโอด้วยกล้อง DSLR และตัดต่อวิดีโออีกด้วย ในฐานะช่างถ่ายวิดีโอ ฉันต้องการแถบเลื่อนในการถ่ายวิดีโอ และก่อนอื่นฉันจะอธิบายสั้นๆ ว่ามันคืออะไร ภาพด้านล่างแสดงแถบเลื่อนจากโรงงาน

แถบเลื่อนถูกออกแบบมาสำหรับการถ่ายวิดีโอด้วยกล้องและกล้องวิดีโอ มันคล้ายคลึงกับระบบรางที่ใช้ในโรงภาพยนตร์รูปแบบไวด์ ด้วยความช่วยเหลือนี้ กล้องจึงสร้างการเคลื่อนไหวที่ราบรื่นไปรอบๆ วัตถุที่กำลังถ่ายภาพ เอฟเฟกต์ที่ทรงพลังอีกอย่างหนึ่งที่สามารถใช้ได้เมื่อทำงานกับแถบเลื่อนคือความสามารถในการขยับเข้ามาใกล้หรือไกลจากวัตถุ รูปภาพถัดไป:เครื่องยนต์ที่ได้รับเลือกให้ทำแถบเลื่อน

ตัวเลื่อนขับเคลื่อนด้วยมอเตอร์กระแสตรง 12 โวลต์ พบไดอะแกรมของตัวควบคุมสำหรับมอเตอร์ที่เคลื่อนย้ายแคร่เลื่อนบนอินเทอร์เน็ต รูปภาพถัดไปแสดงไฟแสดงสถานะเพาเวอร์บน LED สวิตช์สลับที่ควบคุมการถอยหลังและสวิตช์เปิดปิด

เมื่อใช้งานอุปกรณ์ดังกล่าว สิ่งสำคัญคือต้องมีการควบคุมความเร็วที่ราบรื่น รวมถึงการเปิดเครื่องยนต์กลับด้านได้ง่าย ในกรณีที่ใช้ตัวควบคุมของเรา ความเร็วการหมุนของเพลามอเตอร์จะถูกปรับอย่างราบรื่นโดยการหมุนปุ่มของตัวต้านทานแบบแปรผัน 5 kOhm บางทีฉันอาจไม่ใช่ผู้ใช้ไซต์นี้เพียงคนเดียวที่สนใจในการถ่ายภาพและคนอื่นอาจต้องการทำซ้ำอุปกรณ์นี้ ผู้ที่ต้องการดาวน์โหลดไฟล์เก็บถาวรพร้อมแผนภาพวงจรและแผงวงจรพิมพ์ของตัวควบคุมในตอนท้าย ของบทความ รูปต่อไปนี้แสดงแผนผังของตัวควบคุมสำหรับเครื่องยนต์:
วงจรควบคุม

วงจรนี้ง่ายมากและสามารถประกอบได้ง่ายแม้โดยนักวิทยุสมัครเล่นมือใหม่ ข้อดีของการประกอบอุปกรณ์นี้ฉันสามารถตั้งชื่อได้ว่ามีต้นทุนต่ำและสามารถปรับแต่งให้ตรงตามความต้องการของคุณได้ รูปภาพแสดงแผงวงจรพิมพ์ของคอนโทรลเลอร์:

แต่ขอบเขตของการใช้ตัวควบคุมนี้ไม่ จำกัด เฉพาะตัวเลื่อนเพียงอย่างเดียว สามารถใช้เป็นตัวควบคุมความเร็วเช่นสว่านเครื่องจักร Dremel แบบโฮมเมดที่ใช้พลังงาน 12 โวลต์หรือเครื่องทำความเย็นของคอมพิวเตอร์ที่มีขนาด 80 x 80 หรือ 120 x 120 มม. ฉันยังพัฒนารูปแบบการถอยหลังเครื่องยนต์หรืออีกนัยหนึ่งคือเปลี่ยนการหมุนของเพลาไปในทิศทางอื่นอย่างรวดเร็ว ในการทำเช่นนี้ ฉันใช้สวิตช์สลับหกพินที่มี 2 ตำแหน่ง รูปต่อไปนี้แสดงแผนภาพการเชื่อมต่อ:

หน้าสัมผัสตรงกลางของสวิตช์สลับที่มีเครื่องหมาย (+) และ (-) เชื่อมต่อกับหน้าสัมผัสบนบอร์ดที่มีเครื่องหมาย M1.1 และ M1.2 ขั้วไม่สำคัญ ทุกคนรู้ดีว่าเครื่องทำความเย็นของคอมพิวเตอร์เมื่อแรงดันไฟฟ้าและความเร็วลดลงทำให้เกิดเสียงรบกวนน้อยลงระหว่างการทำงาน ในภาพถัดไป ทรานซิสเตอร์ KT805AM อยู่บนหม้อน้ำ:

ทรานซิสเตอร์โครงสร้าง n-p-n กำลังปานกลางและสูงเกือบทุกตัวสามารถใช้ในวงจรได้ ไดโอดยังสามารถแทนที่ด้วยอะนาล็อกที่เหมาะสมกับกระแสเช่น 1N4001, 1N4007 และอื่น ๆ ขั้วต่อมอเตอร์ถูกแบ่งโดยไดโอดในการเชื่อมต่อแบบย้อนกลับ ซึ่งทำเพื่อปกป้องทรานซิสเตอร์ระหว่างช่วงเปิดและปิดของวงจร เนื่องจากมอเตอร์ของเรามีโหลดแบบเหนี่ยวนำ นอกจากนี้ วงจรยังแสดงข้อบ่งชี้ว่าแถบเลื่อนเปิดอยู่บน LED ที่เชื่อมต่อแบบอนุกรมกับตัวต้านทาน

เมื่อใช้เครื่องยนต์ที่มีกำลังมากกว่าที่แสดงในรูปภาพ จะต้องติดทรานซิสเตอร์เข้ากับหม้อน้ำเพื่อปรับปรุงการระบายความร้อน ภาพของบอร์ดผลลัพธ์แสดงอยู่ด้านล่าง:

บอร์ดควบคุมผลิตขึ้นโดยใช้วิธี LUT คุณสามารถดูสิ่งที่เกิดขึ้นในตอนท้ายได้ในวิดีโอ
วีดีโอการทำงาน
ในไม่ช้าทันทีที่ได้รับชิ้นส่วนที่ขาดหายไปซึ่งส่วนใหญ่เป็นกลไกฉันจะเริ่มประกอบอุปกรณ์ในเคส ส่งบทความแล้ว อเล็กเซย์ ซิตคอฟ .
แผนผังและภาพรวมของตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V
เพื่อเพิ่มและลดความเร็วการหมุนของเพลาได้อย่างราบรื่นจึงมีอุปกรณ์พิเศษ - ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V การทำงานที่เสถียร แรงดันไฟฟ้าไม่หยุดชะงัก อายุการใช้งานยาวนาน - ข้อดีของการใช้ตัวควบคุมความเร็วรอบเครื่องยนต์ 220, 12 และ 24 โวลต์
- ทำไมคุณถึงต้องใช้ตัวแปลงความถี่?
- พื้นที่ใช้งาน
- การเลือกอุปกรณ์
- ถ้าอุปกรณ์
- ประเภทของอุปกรณ์
- อุปกรณ์ไทรแอก
- กระบวนการสัญญาณตามสัดส่วน
ทำไมคุณถึงต้องใช้ตัวแปลงความถี่?
 หน้าที่ของตัวควบคุมคือการกลับแรงดันไฟฟ้า 12, 24 โวลต์ เพื่อให้มั่นใจว่าการสตาร์ทและหยุดเป็นไปอย่างราบรื่นโดยใช้การปรับความกว้างพัลส์
หน้าที่ของตัวควบคุมคือการกลับแรงดันไฟฟ้า 12, 24 โวลต์ เพื่อให้มั่นใจว่าการสตาร์ทและหยุดเป็นไปอย่างราบรื่นโดยใช้การปรับความกว้างพัลส์
ตัวควบคุมความเร็วรวมอยู่ในโครงสร้างของอุปกรณ์หลายชนิดเนื่องจากรับประกันความแม่นยำของการควบคุมไฟฟ้า สิ่งนี้ช่วยให้คุณปรับความเร็วได้ตามปริมาณที่ต้องการ
พื้นที่ใช้งาน
ตัวควบคุมความเร็วมอเตอร์กระแสตรงใช้ในงานอุตสาหกรรมและในประเทศจำนวนมาก ตัวอย่างเช่น:
- เครื่องทำความร้อนที่ซับซ้อน
- อุปกรณ์ขับเคลื่อน
- เครื่องเชื่อม
- เตาอบไฟฟ้า
- เครื่องดูดฝุ่น;
- จักรเย็บผ้า;
- เครื่องซักผ้า.
การเลือกอุปกรณ์
![]() ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
- ตัวควบคุมเวกเตอร์เป็นเรื่องปกติสำหรับมอเตอร์คอมมิวเตเตอร์ แต่ตัวควบคุมแบบสเกลาร์มีความน่าเชื่อถือมากกว่า
- เกณฑ์การคัดเลือกที่สำคัญคืออำนาจ ต้องสอดคล้องกับที่ได้รับอนุญาตในหน่วยที่ใช้ จะดีกว่าเพื่อให้ระบบทำงานได้อย่างปลอดภัย
- แรงดันไฟฟ้าจะต้องอยู่ในช่วงกว้างที่ยอมรับได้
- วัตถุประสงค์หลักของตัวควบคุมคือการแปลงความถี่ ดังนั้นจึงต้องเลือกแง่มุมนี้ตามข้อกำหนดทางเทคนิค
- คุณต้องใส่ใจกับอายุการใช้งานขนาดจำนวนอินพุตด้วย
ถ้าอุปกรณ์
- ตัวควบคุมธรรมชาติของมอเตอร์ AC;
- หน่วยไดรฟ์;
- องค์ประกอบเพิ่มเติม
แผนภาพวงจรของตัวควบคุมความเร็วเครื่องยนต์ 12 V แสดงในรูป ปรับความเร็วโดยใช้โพเทนชิออมิเตอร์ หากรับพัลส์ที่มีความถี่ 8 kHz ที่อินพุต แรงดันไฟฟ้าจะเท่ากับ 12 โวลต์
สามารถซื้ออุปกรณ์ได้ที่จุดขายเฉพาะหรือทำเองก็ได้

วงจรควบคุมความเร็วกระแสสลับ
เมื่อสตาร์ทมอเตอร์สามเฟสที่กำลังเต็ม กระแสจะถูกส่ง การกระทำซ้ำประมาณ 7 ครั้ง กระแสไฟฟ้าทำให้ขดลวดมอเตอร์โค้งงอ ทำให้เกิดความร้อนเป็นระยะเวลานาน คอนเวอร์เตอร์คืออินเวอร์เตอร์ที่ให้การแปลงพลังงาน แรงดันไฟฟ้าเข้าสู่ตัวควบคุมโดยที่ 220 โวลต์จะถูกแก้ไขโดยใช้ไดโอดที่อยู่ที่อินพุต จากนั้นกระแสจะถูกกรองผ่านตัวเก็บประจุ 2 ตัว PWM ถูกสร้างขึ้น จากนั้นสัญญาณพัลส์จะถูกส่งจากขดลวดมอเตอร์ไปยังไซนัสอยด์เฉพาะ
มีอุปกรณ์สากล 12V สำหรับมอเตอร์แบบไร้แปรงถ่าน
เพื่อประหยัดค่าไฟฟ้า ผู้อ่านของเราขอแนะนำกล่องประหยัดไฟ การชำระเงินรายเดือนจะน้อยกว่าก่อนใช้โปรแกรมประหยัด 30-50% โดยจะลบส่วนประกอบที่เกิดปฏิกิริยาออกจากเครือข่าย ส่งผลให้โหลดลดลง และเป็นผลให้สิ้นเปลืองกระแสไฟด้วย เครื่องใช้ไฟฟ้ากินไฟน้อยลงและต้นทุนก็ลดลง

วงจรประกอบด้วยสองส่วน - ตรรกะและกำลัง ไมโครคอนโทรลเลอร์ตั้งอยู่บนชิป รูปแบบนี้เป็นเรื่องปกติสำหรับเครื่องยนต์ที่ทรงพลัง ความพิเศษของเรกูเลเตอร์อยู่ที่การใช้งานกับเครื่องยนต์ประเภทต่างๆ วงจรจ่ายไฟแยกกัน ไดรเวอร์หลักต้องใช้ไฟ 12V
ประเภทของอุปกรณ์
อุปกรณ์ไทรแอก
อุปกรณ์ Triac ใช้เพื่อควบคุมแสงสว่าง กำลังขององค์ประกอบความร้อน และความเร็วในการหมุน
 วงจรควบคุมที่ใช้ triac มีชิ้นส่วนขั้นต่ำดังแสดงในรูป โดยที่ C1 เป็นตัวเก็บประจุ R1 เป็นตัวต้านทานตัวแรก R2 เป็นตัวต้านทานตัวที่สอง
วงจรควบคุมที่ใช้ triac มีชิ้นส่วนขั้นต่ำดังแสดงในรูป โดยที่ C1 เป็นตัวเก็บประจุ R1 เป็นตัวต้านทานตัวแรก R2 เป็นตัวต้านทานตัวที่สอง
เมื่อใช้ตัวแปลง พลังงานจะถูกควบคุมโดยการเปลี่ยนเวลาของไทรแอคแบบเปิด หากปิดอยู่ ตัวเก็บประจุจะถูกชาร์จโดยโหลดและตัวต้านทาน ตัวต้านทานตัวหนึ่งควบคุมปริมาณกระแสไฟฟ้า และตัวที่สองควบคุมอัตราการชาร์จ
เมื่อตัวเก็บประจุถึงเกณฑ์แรงดันไฟฟ้าสูงสุดที่ 12V หรือ 24V สวิตช์จะทำงาน ไทรแอกจะเข้าสู่สถานะเปิด เมื่อแรงดันไฟหลักผ่านศูนย์ ไทรแอกจะถูกล็อค จากนั้นตัวเก็บประจุจะมีประจุลบ
ตัวแปลงบนกุญแจอิเล็กทรอนิกส์
ตัวควบคุมไทริสเตอร์ทั่วไปที่มีวงจรการทำงานที่เรียบง่าย
ไทริสเตอร์ทำงานในเครือข่ายกระแสสลับ
ประเภทที่แยกจากกันคือตัวปรับแรงดันไฟฟ้ากระแสสลับ โคลงประกอบด้วยหม้อแปลงที่มีขดลวดจำนวนมาก

วงจรกันโคลง DC
เครื่องชาร์จไทริสเตอร์ 24 โวลต์
ไปยังแหล่งจ่ายแรงดันไฟฟ้า 24 โวลต์ หลักการทำงานคือการชาร์จตัวเก็บประจุและไทริสเตอร์ที่ถูกล็อค และเมื่อตัวเก็บประจุถึงแรงดันไฟฟ้า ไทริสเตอร์จะส่งกระแสไปที่โหลด
กระบวนการสัญญาณตามสัดส่วน
สัญญาณมาถึงการป้อนกลับแบบฟอร์มอินพุตของระบบ มาดูอย่างใกล้ชิดโดยใช้ไมโครวงจร

ชิป TDA 1085
ชิป TDA 1085 ดังภาพด้านบนให้การควบคุมป้อนกลับของมอเตอร์ 12V, 24V โดยไม่สูญเสียพลังงาน จำเป็นต้องมีเครื่องวัดวามเร็วซึ่งจะส่งข้อเสนอแนะจากเครื่องยนต์ไปยังแผงควบคุม สัญญาณเซ็นเซอร์รักษาเสถียรภาพไปที่วงจรไมโครซึ่งส่งงานไปยังองค์ประกอบกำลัง - เพื่อเพิ่มแรงดันไฟฟ้าให้กับมอเตอร์ เมื่อเพลาถูกโหลด บอร์ดจะเพิ่มแรงดันไฟฟ้าและกำลังเพิ่มขึ้น เมื่อปล่อยเพลา ความตึงจะลดลง การปฏิวัติจะคงที่ แต่แรงบิดของกำลังจะไม่เปลี่ยนแปลง ความถี่ถูกควบคุมในช่วงกว้าง มีการติดตั้งมอเตอร์ขนาด 12, 24 โวลต์ในเครื่องซักผ้า
ด้วยมือของคุณเองคุณสามารถสร้างอุปกรณ์สำหรับเครื่องบด, เครื่องกลึงไม้, เครื่องเหลา, เครื่องผสมคอนกรีต, เครื่องตัดฟาง, เครื่องตัดหญ้า, เครื่องแยกไม้และอื่น ๆ อีกมากมาย
 ตัวควบคุมทางอุตสาหกรรมซึ่งประกอบด้วยตัวควบคุม 12, 24 โวลต์เต็มไปด้วยเรซิน ดังนั้นจึงไม่สามารถซ่อมแซมได้ ดังนั้นอุปกรณ์ 12V มักจะทำแยกกัน ตัวเลือกง่าย ๆ โดยใช้ชิป U2008B คอนโทรลเลอร์ใช้การตอบรับปัจจุบันหรือซอฟต์สตาร์ท หากใช้อย่างหลัง จำเป็นต้องมีองค์ประกอบ C1, R4 ไม่จำเป็นต้องใช้จัมเปอร์ X1 แต่จะมีการป้อนกลับในทางกลับกัน
ตัวควบคุมทางอุตสาหกรรมซึ่งประกอบด้วยตัวควบคุม 12, 24 โวลต์เต็มไปด้วยเรซิน ดังนั้นจึงไม่สามารถซ่อมแซมได้ ดังนั้นอุปกรณ์ 12V มักจะทำแยกกัน ตัวเลือกง่าย ๆ โดยใช้ชิป U2008B คอนโทรลเลอร์ใช้การตอบรับปัจจุบันหรือซอฟต์สตาร์ท หากใช้อย่างหลัง จำเป็นต้องมีองค์ประกอบ C1, R4 ไม่จำเป็นต้องใช้จัมเปอร์ X1 แต่จะมีการป้อนกลับในทางกลับกัน
เมื่อประกอบตัวควบคุม ให้เลือกตัวต้านทานที่เหมาะสม เนื่องจากตัวต้านทานขนาดใหญ่อาจมีการกระตุกที่จุดเริ่มต้น และด้วยตัวต้านทานขนาดเล็ก การชดเชยจะไม่เพียงพอ
สำคัญ! เมื่อทำการปรับตัวควบคุมพลังงาน คุณต้องจำไว้ว่าทุกส่วนของอุปกรณ์เชื่อมต่อกับเครือข่าย AC ดังนั้นจึงต้องปฏิบัติตามข้อควรระวังด้านความปลอดภัย!
ตัวควบคุมความเร็วสำหรับมอเตอร์ 24, 12 โวลต์แบบเฟสเดียวและสามเฟสเป็นอุปกรณ์ที่ใช้งานได้และมีคุณค่าทั้งในชีวิตประจำวันและในอุตสาหกรรม
ตัวควบคุมการหมุนของมอเตอร์
ด้วยกลไกง่ายๆ จะสะดวกในการติดตั้งตัวควบคุมกระแสแบบอะนาล็อก ตัวอย่างเช่นสามารถเปลี่ยนความเร็วการหมุนของเพลามอเตอร์ได้ จากด้านเทคนิค การใช้ตัวควบคุมดังกล่าวทำได้ง่าย (คุณจะต้องติดตั้งทรานซิสเตอร์ตัวเดียว) เหมาะสำหรับการปรับความเร็วอิสระของมอเตอร์ในหุ่นยนต์และอุปกรณ์จ่ายไฟ ประเภทของหน่วยงานกำกับดูแลที่พบบ่อยที่สุดคือช่องทางเดียวและสองช่องทาง
วิดีโอหมายเลข 1 ตัวควบคุมช่องสัญญาณเดียวในการทำงาน เปลี่ยนความเร็วในการหมุนของเพลามอเตอร์โดยการหมุนปุ่มตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 2 การเพิ่มความเร็วในการหมุนของเพลามอเตอร์เมื่อใช้งานตัวควบคุมช่องสัญญาณเดียว การเพิ่มจำนวนรอบจากค่าต่ำสุดไปเป็นค่าสูงสุดเมื่อหมุนปุ่มหมุนตัวต้านทานแบบแปรผัน
วิดีโอหมายเลข 3 ตัวควบคุมสองช่องสัญญาณกำลังทำงาน การตั้งค่าความเร็วแรงบิดของเพลามอเตอร์โดยอิสระโดยอาศัยตัวต้านทานแบบทริมมิง
วิดีโอหมายเลข 4 วัดแรงดันไฟฟ้าที่เอาต์พุตของตัวควบคุมด้วยมัลติมิเตอร์แบบดิจิตอล ค่าผลลัพธ์จะเท่ากับแรงดันไฟฟ้าของแบตเตอรี่ซึ่งลบออกแล้ว 0.6 โวลต์ (ความแตกต่างเกิดขึ้นเนื่องจากแรงดันไฟฟ้าตกคร่อมทางแยกทรานซิสเตอร์) เมื่อใช้แบตเตอรี่ขนาด 9.55 โวลต์ จะมีการบันทึกการเปลี่ยนแปลงจาก 0 เป็น 8.9 โวลต์
หน้าที่และลักษณะสำคัญ
กระแสโหลดของหน่วยงานกำกับดูแลช่องเดียว (ภาพถ่าย 1) และสองช่อง (ภาพถ่าย 2) ไม่เกิน 1.5 A ดังนั้นเพื่อเพิ่มความสามารถในการรับน้ำหนักทรานซิสเตอร์ KT815A จะถูกแทนที่ด้วย KT972A หมายเลขพินสำหรับทรานซิสเตอร์เหล่านี้จะเหมือนกัน (e-k-b) แต่รุ่น KT972A ใช้งานได้กระแสสูงสุด 4A


ตัวควบคุมมอเตอร์ช่องเดียว
อุปกรณ์ควบคุมมอเตอร์หนึ่งตัวซึ่งขับเคลื่อนด้วยแรงดันไฟฟ้าในช่วง 2 ถึง 12 โวลต์
การออกแบบอุปกรณ์
องค์ประกอบการออกแบบหลักของตัวควบคุมแสดงอยู่ในรูปภาพ 3. อุปกรณ์ประกอบด้วยห้าองค์ประกอบ: ตัวต้านทานความต้านทานแบบแปรผันสองตัวที่มีความต้านทาน 10 kOhm (หมายเลข 1) และ 1 kOhm (หมายเลข 2) ทรานซิสเตอร์รุ่น KT815A (หมายเลข 3) สกรูสองส่วนคู่หนึ่ง เทอร์มินัลบล็อกสำหรับเอาต์พุตต่อมอเตอร์ (หมายเลข 4) และอินพุตสำหรับต่อแบตเตอรี่ (หมายเลข 5)

หมายเหตุ 1.ไม่จำเป็นต้องติดตั้งแผงขั้วต่อสกรู คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
ขั้นตอนการทำงานของตัวควบคุมมอเตอร์อธิบายไว้ในแผนภาพไฟฟ้า (รูปที่ 1) เมื่อคำนึงถึงขั้วไฟฟ้าแล้ว ขั้วต่อ XT1 จะจ่ายแรงดันไฟฟ้าคงที่ หลอดไฟหรือมอเตอร์เชื่อมต่อกับขั้วต่อ XT2 ตัวต้านทานแบบแปรผัน R1 เปิดอยู่ที่อินพุต การหมุนปุ่มจะเปลี่ยนศักย์ไฟฟ้าที่เอาต์พุตตรงกลางซึ่งตรงข้ามกับค่าลบของแบตเตอรี่ ผ่านตัวจำกัดกระแส R2 เอาต์พุตตรงกลางจะเชื่อมต่อกับเทอร์มินัลฐานของทรานซิสเตอร์ VT1 ในกรณีนี้ ทรานซิสเตอร์จะเปิดตามวงจรกระแสปกติ ศักย์ไฟฟ้าเชิงบวกที่เอาท์พุตฐานจะเพิ่มขึ้นเมื่อเอาท์พุตตรงกลางเคลื่อนขึ้นจากการหมุนอย่างราบรื่นของปุ่มตัวต้านทานปรับค่าได้ มีกระแสเพิ่มขึ้นซึ่งเกิดจากการลดความต้านทานของจุดเชื่อมต่อตัวสะสมและตัวปล่อยในทรานซิสเตอร์ VT1 ศักยภาพจะลดลงหากสถานการณ์กลับด้าน

แผนภาพวงจรไฟฟ้า
วัสดุและรายละเอียด
ต้องใช้แผงวงจรพิมพ์ขนาด 20x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่ง (ความหนาที่อนุญาต 1-1.5 มม.) ตารางที่ 1 แสดงรายการส่วนประกอบวิทยุ

โน้ต 2.ตัวต้านทานแบบแปรผันที่จำเป็นสำหรับอุปกรณ์สามารถผลิตได้ทุกประเภท สิ่งสำคัญคือต้องสังเกตค่าความต้านทานปัจจุบันที่ระบุไว้ในตารางที่ 1
หมายเหตุ 3- ในการควบคุมกระแสที่สูงกว่า 1.5A ทรานซิสเตอร์ KT815G จะถูกแทนที่ด้วย KT972A ที่ทรงพลังกว่า (ด้วยกระแสสูงสุด 4A) ในกรณีนี้ไม่จำเป็นต้องเปลี่ยนการออกแบบแผงวงจรพิมพ์เนื่องจากการกระจายพินสำหรับทรานซิสเตอร์ทั้งสองจะเหมือนกัน
กระบวนการสร้าง
สำหรับงานต่อไป คุณต้องดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความ แตกไฟล์แล้วพิมพ์ แบบควบคุม (ไฟล์ termo1) จะพิมพ์บนกระดาษมัน และแบบติดตั้ง (ไฟล์ montag1) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
ถัดไป ภาพวาดของแผงวงจร (หมายเลข 1 ในภาพที่ 4) ติดกาวเข้ากับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ (หมายเลข 2 ในภาพที่ 4) จำเป็นต้องเจาะรู (หมายเลข 3 ในภาพที่ 14) บนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน ภาพที่ 5 แสดง pinout ของทรานซิสเตอร์ KT815 

อินพุตและเอาต์พุตของขั้วต่อเทอร์มินัลบล็อกจะมีเครื่องหมายสีขาว แหล่งจ่ายแรงดันไฟฟ้าเชื่อมต่อกับแผงขั้วต่อผ่านคลิป ตัวควบคุมช่องสัญญาณเดียวที่ประกอบอย่างสมบูรณ์แสดงอยู่ในรูปภาพ เชื่อมต่อแหล่งพลังงาน (แบตเตอรี่ 9 โวลต์) ในขั้นตอนสุดท้ายของการประกอบ ตอนนี้คุณสามารถปรับความเร็วการหมุนของเพลาได้โดยใช้มอเตอร์ ในการทำเช่นนี้คุณจะต้องหมุนปุ่มปรับตัวต้านทานแบบแปรผันได้อย่างราบรื่น


ในการทดสอบอุปกรณ์คุณจะต้องพิมพ์ภาพวาดของดิสก์จากไฟล์เก็บถาวร ถัดไปคุณต้องวางภาพวาดนี้ (หมายเลข 1) ลงบนกระดาษแข็งหนาและบาง (หมายเลข 2) จากนั้นใช้กรรไกรตัดแผ่นดิสก์ออก (หมายเลข 3)

ชิ้นงานที่ได้จะถูกพลิกกลับ (หมายเลข 1) และติดเทปพันสายไฟสีดำสี่เหลี่ยม (หมายเลข 2) ไว้ที่กึ่งกลางเพื่อให้พื้นผิวของเพลามอเตอร์ติดกับจานได้ดีขึ้น คุณต้องทำหลุม (หมายเลข 3) ดังที่แสดงในภาพ จากนั้นจึงติดตั้งดิสก์บนเพลามอเตอร์และเริ่มการทดสอบได้ ตัวควบคุมมอเตอร์ช่องเดียวพร้อมแล้ว!
ตัวควบคุมมอเตอร์สองช่องสัญญาณ
ใช้เพื่อควบคุมมอเตอร์คู่พร้อมกันอย่างอิสระ จ่ายไฟจากแรงดันไฟฟ้าตั้งแต่ 2 ถึง 12 โวลต์ กระแสโหลดได้รับการจัดอันดับสูงสุด 1.5A ต่อช่องสัญญาณ
ส่วนประกอบหลักของการออกแบบแสดงในภาพที่ 10 และประกอบด้วย: ตัวต้านทานการตัดแต่งสองตัวสำหรับการปรับช่องที่ 2 (หมายเลข 1) และช่องที่ 1 (หมายเลข 2) บล็อกเทอร์มินัลสกรูสองส่วนสามตัวสำหรับเอาต์พุตไปที่ช่องที่ 2 มอเตอร์ (หมายเลข 3) สำหรับเอาต์พุตไปยังมอเตอร์ตัวที่ 1 (หมายเลข 4) และสำหรับอินพุต (หมายเลข 5)

หมายเหตุ:1 การติดตั้งแผงขั้วต่อสกรูเป็นทางเลือก คุณสามารถเชื่อมต่อมอเตอร์และแหล่งพลังงานได้โดยตรงโดยใช้ลวดยึดเกลียวบาง
หลักการทำงาน
วงจรของตัวควบคุมสองช่องสัญญาณนั้นเหมือนกับวงจรไฟฟ้าของตัวควบคุมช่องสัญญาณเดียว ประกอบด้วยสองส่วน (รูปที่ 2) ข้อแตกต่างที่สำคัญ: ตัวต้านทานความต้านทานแบบแปรผันจะถูกแทนที่ด้วยตัวต้านทานแบบทริมเมอร์ ความเร็วการหมุนของเพลาจะถูกตั้งค่าไว้ล่วงหน้า 
โน้ต 2. เพื่อปรับความเร็วในการหมุนของมอเตอร์อย่างรวดเร็ว ตัวต้านทานทริมเมอร์จะถูกแทนที่ด้วยลวดยึดที่มีตัวต้านทานความต้านทานแบบแปรผันพร้อมค่าความต้านทานที่ระบุในแผนภาพ
วัสดุและรายละเอียด
คุณจะต้องมีแผงวงจรพิมพ์ขนาด 30x30 มม. ทำจากแผ่นไฟเบอร์กลาสฟอยล์ด้านหนึ่งมีความหนา 1-1.5 มม. ตารางที่ 2 แสดงรายการส่วนประกอบวิทยุ

กระบวนการสร้าง
หลังจากดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความแล้ว คุณจะต้องแตกไฟล์และพิมพ์ออกมา แบบร่างตัวควบคุมสำหรับการถ่ายเทความร้อน (ไฟล์ termo2) จะพิมพ์บนกระดาษมัน และแบบร่างการติดตั้ง (ไฟล์ montag2) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
การวาดแผงวงจรจะติดอยู่กับรางที่มีกระแสไฟฟ้าอยู่ฝั่งตรงข้ามของแผงวงจรพิมพ์ สร้างรูบนภาพวาดการติดตั้งในตำแหน่งการติดตั้ง ภาพวาดการติดตั้งติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งและรูจะต้องตรงกัน กำลังปักหมุดทรานซิสเตอร์ KT815 ในการตรวจสอบ คุณต้องเชื่อมต่ออินพุต 1 และ 2 ชั่วคราวด้วยสายยึด


อินพุตใดๆ เชื่อมต่อกับขั้วของแหล่งพลังงาน (ตัวอย่างแสดงแบตเตอรี่ขนาด 9 โวลต์) ขั้วลบของแหล่งจ่ายไฟติดอยู่ที่กึ่งกลางของแผงขั้วต่อ สิ่งสำคัญที่ต้องจำ: สายสีดำคือ “-” และสายสีแดงคือ “+”
มอเตอร์จะต้องเชื่อมต่อกับแผงขั้วต่อสองตัว และต้องตั้งค่าความเร็วที่ต้องการด้วย หลังจากการทดสอบสำเร็จ คุณจะต้องลบการเชื่อมต่อชั่วคราวของอินพุตและติดตั้งอุปกรณ์บนโมเดลหุ่นยนต์ ตัวควบคุมมอเตอร์สองช่องสัญญาณพร้อมแล้ว!
เอกสารสำคัญมีไดอะแกรมและภาพวาดที่จำเป็นสำหรับการทำงาน ตัวส่งของทรานซิสเตอร์จะมีลูกศรสีแดงกำกับไว้
แผนภาพตัวควบคุมความเร็วมอเตอร์กระแสตรง
วงจรควบคุมความเร็วมอเตอร์กระแสตรงทำงานบนหลักการมอดูเลตความกว้างพัลส์ และใช้เพื่อเปลี่ยนความเร็วของมอเตอร์กระแสตรง 12 โวลต์ การควบคุมความเร็วเพลาเครื่องยนต์โดยใช้การปรับความกว้างพัลส์ให้ประสิทธิภาพที่มากกว่าการเปลี่ยนแรงดันไฟฟ้ากระแสตรงที่จ่ายให้กับเครื่องยนต์ แม้ว่าเราจะพิจารณาโครงร่างเหล่านี้ด้วย

วงจรควบคุมความเร็วมอเตอร์กระแสตรง 12 โวลต์

มอเตอร์เชื่อมต่ออยู่ในวงจรกับทรานซิสเตอร์เอฟเฟกต์สนามซึ่งควบคุมโดยการมอดูเลตความกว้างพัลส์ที่ทำบนชิปจับเวลา NE555 ซึ่งเป็นเหตุผลว่าทำไมวงจรจึงกลายเป็นเรื่องง่าย

ตัวควบคุม PWM ถูกใช้งานโดยใช้เครื่องกำเนิดพัลส์ทั่วไปบนเครื่องมัลติไวเบรเตอร์ที่เสถียร สร้างพัลส์ด้วยอัตราการทำซ้ำ 50 Hz และสร้างบนตัวจับเวลา NE555 ยอดนิยม สัญญาณที่มาจากมัลติไวเบรเตอร์จะสร้างสนามไบแอสที่ประตูของทรานซิสเตอร์เอฟเฟกต์สนาม ระยะเวลาของพัลส์บวกจะถูกปรับโดยใช้ความต้านทานผันแปร R2 ยิ่งระยะเวลาที่พัลส์บวกมาถึงประตูของทรานซิสเตอร์เอฟเฟกต์สนามนานขึ้น พลังงานที่จ่ายให้กับมอเตอร์กระแสตรงก็จะยิ่งมากขึ้นเท่านั้น และในทางกลับกัน ยิ่งระยะเวลาพัลส์สั้นลง มอเตอร์ไฟฟ้าก็จะยิ่งหมุนน้อยลงเท่านั้น วงจรนี้ใช้งานได้ดีกับแบตเตอรี่ 12 โวลต์
วงจรควบคุมความเร็วมอเตอร์กระแสตรง 6 โวลต์
ความเร็วของมอเตอร์ 6 โวลต์ สามารถปรับได้ภายใน 5-95%
ตัวควบคุมความเร็วรอบเครื่องยนต์บนตัวควบคุม PIC
การควบคุมความเร็วในวงจรนี้ทำได้โดยการใช้พัลส์แรงดันไฟฟ้าที่มีระยะเวลาต่างกันกับมอเตอร์ไฟฟ้า เพื่อวัตถุประสงค์เหล่านี้ จะใช้ PWM (โมดูเลเตอร์ความกว้างพัลส์) ในกรณีนี้ การควบคุมความกว้างพัลส์มีให้โดยไมโครคอนโทรลเลอร์ PIC เพื่อควบคุมความเร็วในการหมุนของเครื่องยนต์ จะใช้ปุ่ม SB1 และ SB2 สองปุ่ม "เพิ่มเติม" และ "น้อยลง" คุณสามารถเปลี่ยนความเร็วในการหมุนได้เฉพาะเมื่อกดสวิตช์สลับ "Start" เท่านั้น ระยะเวลาการเต้นของชีพจรจะแตกต่างกันไปเป็นเปอร์เซ็นต์ของช่วงเวลาตั้งแต่ 30 ถึง 100%
ในฐานะที่เป็นตัวปรับแรงดันไฟฟ้าสำหรับไมโครคอนโทรลเลอร์ PIC16F628A จึงมีการใช้ตัวปรับความเสถียร KR1158EN5V สามพิน ซึ่งมีแรงดันไฟฟ้าอินพุต-เอาท์พุตต่ำเพียงประมาณ 0.6V แรงดันไฟฟ้าขาเข้าสูงสุดคือ 30V ทั้งหมดนี้ช่วยให้สามารถใช้มอเตอร์ที่มีแรงดันไฟฟ้าตั้งแต่ 6V ถึง 27V ทรานซิสเตอร์คอมโพสิต KT829A ใช้เป็นสวิตช์ไฟซึ่งควรติดตั้งบนหม้อน้ำ
อุปกรณ์ประกอบบนแผงวงจรพิมพ์ขนาด 61 x 52 มม. คุณสามารถดาวน์โหลดไฟล์ภาพวาด PCB และเฟิร์มแวร์ได้จากลิงก์ด้านบน (ดูโฟลเดอร์ในไฟล์เก็บถาวร 027-เอล)

วิธีที่ง่ายที่สุดในการควบคุมความเร็วในการหมุนของมอเตอร์กระแสตรงนั้นขึ้นอยู่กับการใช้การปรับความกว้างพัลส์ (PWM หรือ PWM) สาระสำคัญของวิธีนี้คือแรงดันไฟฟ้าจะจ่ายให้กับมอเตอร์ในรูปของพัลส์ ในกรณีนี้อัตราการเกิดซ้ำของพัลส์จะคงที่ แต่ระยะเวลาอาจแตกต่างกันไป
สัญญาณ PWM มีลักษณะเฉพาะด้วยพารามิเตอร์เช่นรอบการทำงานหรือรอบการทำงาน นี่คือส่วนกลับของรอบการทำงานและเท่ากับอัตราส่วนของระยะเวลาพัลส์ต่อคาบของมัน
D = (ที/ที) * 100%
รูปภาพด้านล่างแสดงสัญญาณ PWM ที่มีรอบการทำงานต่างกัน
ด้วยวิธีการควบคุมนี้ ความเร็วในการหมุนของมอเตอร์จะแปรผันตามรอบการทำงานของสัญญาณ PWM
วงจรควบคุมมอเตอร์กระแสตรงอย่างง่าย
วงจรควบคุมมอเตอร์กระแสตรงที่ง่ายที่สุดประกอบด้วยทรานซิสเตอร์เอฟเฟกต์สนาม ซึ่งมีเกตที่มาพร้อมกับสัญญาณ PWM ทรานซิสเตอร์ในวงจรนี้ทำหน้าที่เป็นสวิตช์อิเล็กทรอนิกส์ที่จะสลับขั้วหนึ่งของมอเตอร์ไปที่กราวด์ ทรานซิสเตอร์จะเปิดขึ้นในช่วงเวลาของพัลส์

เครื่องยนต์จะมีพฤติกรรมอย่างไรเมื่อเปิดเครื่องเช่นนี้? หากความถี่ของสัญญาณ PWM ต่ำ (หลาย Hz) มอเตอร์จะกระตุก สิ่งนี้จะสังเกตได้ชัดเจนเป็นพิเศษเมื่อมีรอบการทำงานเล็กน้อยของสัญญาณ PWM
ที่ความถี่หลายร้อย Hz มอเตอร์จะหมุนอย่างต่อเนื่อง และความเร็วในการหมุนจะเปลี่ยนไปตามสัดส่วนรอบการทำงาน พูดโดยคร่าวๆ เครื่องยนต์จะ "รับรู้" ค่าเฉลี่ยของพลังงานที่จ่ายให้
วงจรสร้างสัญญาณ PWM
มีหลายวงจรสำหรับสร้างสัญญาณ PWM หนึ่งในวิธีที่ง่ายที่สุดคือวงจรที่ใช้ตัวจับเวลา 555 ต้องใช้ส่วนประกอบขั้นต่ำ ไม่ต้องตั้งค่าใดๆ และสามารถประกอบได้ภายในหนึ่งชั่วโมง
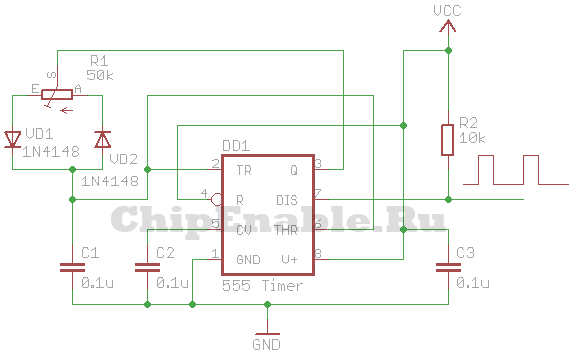
แรงดันไฟฟ้าของวงจร VCC สามารถอยู่ในช่วง 5 - 16 โวลต์ ไดโอดเกือบทุกชนิดสามารถใช้เป็นไดโอด VD1 - VD3 ได้
หากคุณสนใจที่จะทำความเข้าใจวิธีการทำงานของวงจรนี้ คุณต้องดูบล็อกไดอะแกรมของตัวจับเวลา 555 ตัวจับเวลาประกอบด้วยตัวแบ่งแรงดันไฟฟ้า ตัวเปรียบเทียบสองตัว ฟลิปฟล็อป สวิตช์โอเพ่นคอลเลคเตอร์ และบัฟเฟอร์เอาต์พุต

แหล่งจ่ายไฟ (VCC) และพินรีเซ็ตเชื่อมต่อกับแหล่งจ่ายไฟบวก เช่น +5 V และพินกราวด์ (GND) อยู่ที่เครื่องหมายลบ ตัวสะสมแบบเปิดของทรานซิสเตอร์ (พิน DISC) เชื่อมต่อกับแหล่งจ่ายไฟที่เป็นบวกผ่านตัวต้านทานและสัญญาณ PWM จะถูกลบออก ไม่ได้ใช้พิน CONT มีการเชื่อมต่อตัวเก็บประจุอยู่ พินตัวเปรียบเทียบ THRES และ TRIG ถูกรวมเข้าด้วยกันและเชื่อมต่อกับวงจร RC ที่ประกอบด้วยตัวต้านทานแบบปรับค่าได้ ไดโอดสองตัว และตัวเก็บประจุหนึ่งตัว พินกลางของตัวต้านทานปรับค่าได้เชื่อมต่อกับพิน OUT ขั้วปลายสุดของตัวต้านทานเชื่อมต่อผ่านไดโอดกับตัวเก็บประจุซึ่งเชื่อมต่อกับกราวด์ด้วยขั้วที่สอง ด้วยการรวมไดโอดเข้าด้วยกัน ตัวเก็บประจุจึงถูกชาร์จผ่านส่วนหนึ่งของตัวต้านทานแบบแปรผันและคายประจุผ่านอีกส่วนหนึ่ง
ในขณะที่เปิดเครื่องอยู่ พิน OUT จะอยู่ในระดับลอจิคัลต่ำ จากนั้นพิน THRES และ TRIG ต้องขอบคุณไดโอด VD2 ก็จะอยู่ในระดับต่ำเช่นกัน ตัวเปรียบเทียบด้านบนจะเปลี่ยนเอาต์พุตเป็นศูนย์และตัวเปรียบเทียบด้านล่างเป็นหนึ่ง เอาต์พุตของทริกเกอร์จะถูกตั้งค่าเป็นศูนย์ (เนื่องจากมีอินเวอร์เตอร์อยู่ที่เอาต์พุต) สวิตช์ทรานซิสเตอร์จะปิด และพิน OUT จะถูกตั้งค่าไว้ที่ระดับสูง (เนื่องจากมีอินเวอร์เตอร์อยู่ที่อินพุต) ถัดไปตัวเก็บประจุ C3 จะเริ่มชาร์จผ่านไดโอด VD1 เมื่อชาร์จถึงระดับหนึ่ง ตัวเปรียบเทียบที่ต่ำกว่าจะเปลี่ยนเป็นศูนย์ จากนั้นตัวเปรียบเทียบด้านบนจะเปลี่ยนเอาต์พุตเป็นหนึ่ง เอาต์พุตทริกเกอร์จะถูกตั้งค่าเป็นระดับเอกภาพ สวิตช์ทรานซิสเตอร์จะเปิดขึ้น และพิน OUT จะถูกตั้งค่าไว้ที่ระดับต่ำ ตัวเก็บประจุ C3 จะเริ่มคายประจุผ่านไดโอด VD2 จนกว่าจะหมดประจุ และผู้เปรียบเทียบจะเปลี่ยนทริกเกอร์เป็นสถานะอื่น วงจรจะเกิดซ้ำ
ความถี่โดยประมาณของสัญญาณ PWM ที่สร้างโดยวงจรนี้สามารถคำนวณได้โดยใช้สูตรต่อไปนี้:
F = 1.44/(R1*C1), [เฮิร์ตซ์]
โดยที่ R1 อยู่ในหน่วยโอห์ม C1 อยู่ในหน่วยฟารัด
ด้วยค่าที่ระบุในแผนภาพด้านบน ความถี่ของสัญญาณ PWM จะเท่ากับ:
เอฟ = 1.44/(50000*0.0000001) = 288 เฮิรตซ์
ตัวควบคุมความเร็วมอเตอร์กระแสตรงแบบ PWM
ลองรวมสองวงจรที่นำเสนอข้างต้นเข้าด้วยกัน และเราจะได้วงจรควบคุมความเร็วมอเตอร์กระแสตรงแบบง่าย ซึ่งสามารถใช้เพื่อควบคุมความเร็วรอบเครื่องยนต์ของของเล่น หุ่นยนต์ สว่านขนาดเล็ก ฯลฯ
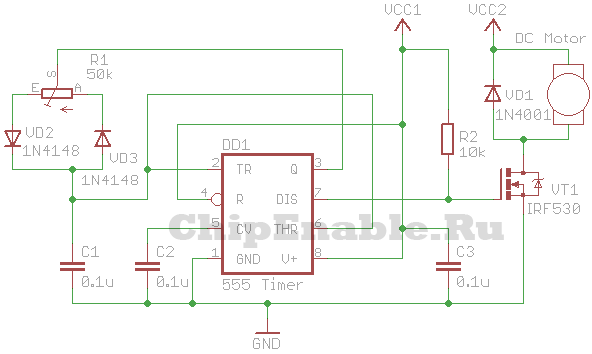
VT1 เป็นทรานซิสเตอร์เอฟเฟกต์สนามชนิด n ที่สามารถทนต่อกระแสมอเตอร์สูงสุดที่แรงดันไฟฟ้าและโหลดเพลาที่กำหนด VCC1 คือ 5 ถึง 16 V, VCC2 มากกว่าหรือเท่ากับ VCC1
แทนที่จะใช้ทรานซิสเตอร์สนามแม่เหล็ก คุณสามารถใช้ทรานซิสเตอร์แบบไบโพลาร์ n-p-n ทรานซิสเตอร์ดาร์ลิงตัน หรือออปโตรีเลย์ที่มีกำลังที่เหมาะสมได้
วงจรควบคุมความเร็วมอเตอร์กระแสตรงทำงานบนหลักการมอดูเลตความกว้างพัลส์ และใช้เพื่อเปลี่ยนความเร็วของมอเตอร์กระแสตรง 12 โวลต์ การควบคุมความเร็วเพลาเครื่องยนต์โดยใช้การปรับความกว้างพัลส์ให้ประสิทธิภาพที่มากกว่าการเปลี่ยนแรงดันไฟฟ้ากระแสตรงที่จ่ายให้กับเครื่องยนต์ แม้ว่าเราจะพิจารณาโครงร่างเหล่านี้ด้วย
วงจรควบคุมความเร็วมอเตอร์กระแสตรง 12 โวลต์
มอเตอร์เชื่อมต่ออยู่ในวงจรกับทรานซิสเตอร์เอฟเฟกต์สนามซึ่งควบคุมโดยการมอดูเลตความกว้างพัลส์ที่ทำบนชิปจับเวลา NE555 ซึ่งเป็นเหตุผลว่าทำไมวงจรจึงกลายเป็นเรื่องง่าย
ตัวควบคุม PWM ถูกใช้งานโดยใช้เครื่องกำเนิดพัลส์ทั่วไปบนเครื่องมัลติไวเบรเตอร์ที่เสถียร สร้างพัลส์ด้วยอัตราการทำซ้ำ 50 Hz และสร้างบนตัวจับเวลา NE555 ยอดนิยม สัญญาณที่มาจากมัลติไวเบรเตอร์จะสร้างสนามไบแอสที่ประตูของทรานซิสเตอร์เอฟเฟกต์สนาม ระยะเวลาของพัลส์บวกจะถูกปรับโดยใช้ความต้านทานผันแปร R2 ยิ่งระยะเวลาที่พัลส์บวกมาถึงประตูของทรานซิสเตอร์เอฟเฟกต์สนามนานขึ้น พลังงานที่จ่ายให้กับมอเตอร์กระแสตรงก็จะยิ่งมากขึ้นเท่านั้น และในทางกลับกัน ยิ่งระยะเวลาพัลส์สั้นลง มอเตอร์ไฟฟ้าก็จะยิ่งหมุนน้อยลงเท่านั้น วงจรนี้ใช้งานได้ดีกับแบตเตอรี่ 12 โวลต์
วงจรควบคุมความเร็วมอเตอร์กระแสตรง 6 โวลต์
ความเร็วของมอเตอร์ 6 โวลต์ สามารถปรับได้ภายใน 5-95%
ตัวควบคุมความเร็วรอบเครื่องยนต์บนตัวควบคุม PIC
การควบคุมความเร็วในวงจรนี้ทำได้โดยการใช้พัลส์แรงดันไฟฟ้าที่มีระยะเวลาต่างกันกับมอเตอร์ไฟฟ้า เพื่อวัตถุประสงค์เหล่านี้ จะใช้ PWM (โมดูเลเตอร์ความกว้างพัลส์) ในกรณีนี้ การควบคุมความกว้างพัลส์มีให้โดยไมโครคอนโทรลเลอร์ PIC เพื่อควบคุมความเร็วในการหมุนของเครื่องยนต์ จะใช้ปุ่ม SB1 และ SB2 สองปุ่ม "เพิ่มเติม" และ "น้อยลง" คุณสามารถเปลี่ยนความเร็วในการหมุนได้เฉพาะเมื่อกดสวิตช์สลับ "Start" เท่านั้น ระยะเวลาการเต้นของชีพจรจะแตกต่างกันไปเป็นเปอร์เซ็นต์ของช่วงเวลาตั้งแต่ 30 ถึง 100%
ในฐานะที่เป็นตัวปรับแรงดันไฟฟ้าสำหรับไมโครคอนโทรลเลอร์ PIC16F628A จึงมีการใช้ตัวปรับความเสถียร KR1158EN5V สามพิน ซึ่งมีแรงดันไฟฟ้าอินพุต-เอาท์พุตต่ำเพียงประมาณ 0.6V แรงดันไฟฟ้าขาเข้าสูงสุดคือ 30V ทั้งหมดนี้ช่วยให้สามารถใช้มอเตอร์ที่มีแรงดันไฟฟ้าตั้งแต่ 6V ถึง 27V ทรานซิสเตอร์คอมโพสิต KT829A ใช้เป็นสวิตช์ไฟซึ่งควรติดตั้งบนหม้อน้ำ
อุปกรณ์ประกอบบนแผงวงจรพิมพ์ขนาด 61 x 52 มม. คุณสามารถดาวน์โหลดไฟล์ภาพวาด PCB และเฟิร์มแวร์ได้จากลิงก์ด้านบน (ดูโฟลเดอร์ในไฟล์เก็บถาวร 027-เอล)
ตัวควบคุมความเร็วมอเตอร์กระแสตรงแบบ PWM
วงจร DIY นี้สามารถใช้เป็นตัวควบคุมความเร็วสำหรับมอเตอร์ DC 12V ที่มีอัตรากระแสไฟสูงถึง 5A หรือใช้เป็นเครื่องหรี่ไฟสำหรับหลอดฮาโลเจน 12V และหลอด LED สูงถึง 50W การควบคุมดำเนินการโดยใช้การปรับความกว้างพัลส์ (PWM) ที่อัตราการเกิดซ้ำของพัลส์ประมาณ 200 เฮิรตซ์ โดยปกติแล้ว ความถี่สามารถเปลี่ยนแปลงได้หากจำเป็น โดยเลือกเพื่อความเสถียรและประสิทธิภาพสูงสุด
โครงสร้างเหล่านี้ส่วนใหญ่ประกอบขึ้นตามรูปแบบที่ง่ายกว่ามาก เรานำเสนอเวอร์ชันขั้นสูงเพิ่มเติมซึ่งใช้ตัวจับเวลา 7555 ไดรเวอร์ทรานซิสเตอร์แบบไบโพลาร์ และ MOSFET อันทรงพลัง การออกแบบนี้ให้การควบคุมความเร็วที่ดีขึ้นและทำงานในช่วงโหลดที่กว้าง นี่เป็นรูปแบบที่มีประสิทธิภาพมากและต้นทุนของชิ้นส่วนเมื่อซื้อเพื่อประกอบเองค่อนข้างต่ำ
วงจรควบคุม PWM สำหรับมอเตอร์ 12 V
![]()
วงจรใช้ตัวจับเวลา 7555 เพื่อสร้างความกว้างพัลส์ที่แปรผันได้ประมาณ 200 Hz ควบคุมทรานซิสเตอร์ Q3 (ผ่านทรานซิสเตอร์ Q1 - Q2) ซึ่งควบคุมความเร็วของมอเตอร์ไฟฟ้าหรือหลอดไฟ
![]()
![]()
มีการใช้งานหลายอย่างสำหรับวงจรนี้ที่จะใช้พลังงานจาก 12V: มอเตอร์ไฟฟ้า พัดลม หรือโคมไฟ สามารถใช้ในรถยนต์ เรือ และยานพาหนะไฟฟ้า ในรถไฟจำลองและอื่นๆ
![]()
สามารถเชื่อมต่อหลอดไฟ LED 12 V เช่น แถบ LED ได้ที่นี่อย่างปลอดภัย ทุกคนรู้ดีว่าหลอดไฟ LED มีประสิทธิภาพมากกว่าหลอดฮาโลเจนหรือหลอดไส้และมีอายุการใช้งานนานกว่ามาก และหากจำเป็นให้จ่ายไฟให้กับคอนโทรลเลอร์ PWM ตั้งแต่ 24 โวลต์ขึ้นไปเนื่องจากตัวไมโครวงจรเองที่มีสเตจบัฟเฟอร์นั้นมีตัวปรับกำลังไฟ
ตัวควบคุมความเร็วมอเตอร์เอซี
![]() ตัวควบคุม PWM 12 โวลต์
ตัวควบคุม PWM 12 โวลต์
ไดร์เวอร์ตัวควบคุม Half Bridge DC
วงจรควบคุมความเร็วสว่านขนาดเล็ก
แผนผังและภาพรวมของตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V
เพื่อเพิ่มและลดความเร็วการหมุนของเพลาได้อย่างราบรื่นจึงมีอุปกรณ์พิเศษ - ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 220V การทำงานที่เสถียร แรงดันไฟฟ้าไม่หยุดชะงัก อายุการใช้งานยาวนาน - ข้อดีของการใช้ตัวควบคุมความเร็วรอบเครื่องยนต์ 220, 12 และ 24 โวลต์
- ทำไมคุณถึงต้องใช้ตัวแปลงความถี่?
- พื้นที่ใช้งาน
- การเลือกอุปกรณ์
- ถ้าอุปกรณ์
- ประเภทของอุปกรณ์
- อุปกรณ์ไทรแอก
- กระบวนการสัญญาณตามสัดส่วน
ทำไมคุณถึงต้องใช้ตัวแปลงความถี่?
หน้าที่ของตัวควบคุมคือการกลับแรงดันไฟฟ้า 12, 24 โวลต์ เพื่อให้มั่นใจว่าการสตาร์ทและหยุดเป็นไปอย่างราบรื่นโดยใช้การปรับความกว้างพัลส์
ตัวควบคุมความเร็วรวมอยู่ในโครงสร้างของอุปกรณ์หลายชนิดเนื่องจากรับประกันความแม่นยำของการควบคุมไฟฟ้า สิ่งนี้ช่วยให้คุณปรับความเร็วได้ตามปริมาณที่ต้องการ
พื้นที่ใช้งาน
ตัวควบคุมความเร็วมอเตอร์กระแสตรงใช้ในงานอุตสาหกรรมและในประเทศจำนวนมาก ตัวอย่างเช่น:
- เครื่องทำความร้อนที่ซับซ้อน
- อุปกรณ์ขับเคลื่อน
- เครื่องเชื่อม
- เตาอบไฟฟ้า
- เครื่องดูดฝุ่น;
- จักรเย็บผ้า;
- เครื่องซักผ้า.
การเลือกอุปกรณ์
![]() ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
ในการเลือกตัวควบคุมที่มีประสิทธิภาพจำเป็นต้องคำนึงถึงลักษณะของอุปกรณ์และวัตถุประสงค์ที่ต้องการด้วย
- ตัวควบคุมเวกเตอร์เป็นเรื่องปกติสำหรับมอเตอร์คอมมิวเตเตอร์ แต่ตัวควบคุมแบบสเกลาร์มีความน่าเชื่อถือมากกว่า
- เกณฑ์การคัดเลือกที่สำคัญคืออำนาจ ต้องสอดคล้องกับที่ได้รับอนุญาตในหน่วยที่ใช้ จะดีกว่าเพื่อให้ระบบทำงานได้อย่างปลอดภัย
- แรงดันไฟฟ้าจะต้องอยู่ในช่วงกว้างที่ยอมรับได้
- วัตถุประสงค์หลักของตัวควบคุมคือการแปลงความถี่ ดังนั้นจึงต้องเลือกแง่มุมนี้ตามข้อกำหนดทางเทคนิค
- คุณต้องใส่ใจกับอายุการใช้งานขนาดจำนวนอินพุตด้วย
ถ้าอุปกรณ์
- ตัวควบคุมธรรมชาติของมอเตอร์ AC;
- หน่วยไดรฟ์;
- องค์ประกอบเพิ่มเติม
แผนภาพวงจรของตัวควบคุมความเร็วเครื่องยนต์ 12 V แสดงในรูป ปรับความเร็วโดยใช้โพเทนชิออมิเตอร์ หากรับพัลส์ที่มีความถี่ 8 kHz ที่อินพุต แรงดันไฟฟ้าจะเท่ากับ 12 โวลต์
สามารถซื้ออุปกรณ์ได้ที่จุดขายเฉพาะหรือทำเองก็ได้
วงจรควบคุมความเร็วกระแสสลับ
เมื่อสตาร์ทมอเตอร์สามเฟสที่กำลังเต็ม กระแสจะถูกส่ง การกระทำซ้ำประมาณ 7 ครั้ง กระแสไฟฟ้าทำให้ขดลวดมอเตอร์โค้งงอ ทำให้เกิดความร้อนเป็นระยะเวลานาน คอนเวอร์เตอร์คืออินเวอร์เตอร์ที่ให้การแปลงพลังงาน แรงดันไฟฟ้าเข้าสู่ตัวควบคุมโดยที่ 220 โวลต์จะถูกแก้ไขโดยใช้ไดโอดที่อยู่ที่อินพุต จากนั้นกระแสจะถูกกรองผ่านตัวเก็บประจุ 2 ตัว PWM ถูกสร้างขึ้น จากนั้นสัญญาณพัลส์จะถูกส่งจากขดลวดมอเตอร์ไปยังไซนัสอยด์เฉพาะ
มีอุปกรณ์สากล 12V สำหรับมอเตอร์แบบไร้แปรงถ่าน
เพื่อประหยัดค่าไฟฟ้า ผู้อ่านของเราขอแนะนำกล่องประหยัดไฟ การชำระเงินรายเดือนจะน้อยกว่าก่อนใช้โปรแกรมประหยัด 30-50% โดยจะลบส่วนประกอบที่เกิดปฏิกิริยาออกจากเครือข่าย ส่งผลให้โหลดลดลง และเป็นผลให้สิ้นเปลืองกระแสไฟด้วย เครื่องใช้ไฟฟ้ากินไฟน้อยลงและต้นทุนก็ลดลง
วงจรประกอบด้วยสองส่วน - ตรรกะและกำลัง ไมโครคอนโทรลเลอร์ตั้งอยู่บนชิป รูปแบบนี้เป็นเรื่องปกติสำหรับเครื่องยนต์ที่ทรงพลัง ความพิเศษของเรกูเลเตอร์อยู่ที่การใช้งานกับเครื่องยนต์ประเภทต่างๆ วงจรจ่ายไฟแยกกัน ไดรเวอร์หลักต้องใช้ไฟ 12V
ประเภทของอุปกรณ์
อุปกรณ์ไทรแอก
อุปกรณ์ Triac ใช้เพื่อควบคุมแสงสว่าง กำลังขององค์ประกอบความร้อน และความเร็วในการหมุน
วงจรควบคุมที่ใช้ triac มีชิ้นส่วนขั้นต่ำดังแสดงในรูป โดยที่ C1 เป็นตัวเก็บประจุ R1 เป็นตัวต้านทานตัวแรก R2 เป็นตัวต้านทานตัวที่สอง
เมื่อใช้ตัวแปลง พลังงานจะถูกควบคุมโดยการเปลี่ยนเวลาของไทรแอคแบบเปิด หากปิดอยู่ ตัวเก็บประจุจะถูกชาร์จโดยโหลดและตัวต้านทาน ตัวต้านทานตัวหนึ่งควบคุมปริมาณกระแสไฟฟ้า และตัวที่สองควบคุมอัตราการชาร์จ
เมื่อตัวเก็บประจุถึงเกณฑ์แรงดันไฟฟ้าสูงสุดที่ 12V หรือ 24V สวิตช์จะทำงาน ไทรแอกจะเข้าสู่สถานะเปิด เมื่อแรงดันไฟหลักผ่านศูนย์ ไทรแอกจะถูกล็อค จากนั้นตัวเก็บประจุจะมีประจุลบ
ตัวแปลงบนกุญแจอิเล็กทรอนิกส์
ตัวควบคุมไทริสเตอร์ทั่วไปที่มีวงจรการทำงานที่เรียบง่าย
ไทริสเตอร์ทำงานในเครือข่ายกระแสสลับ
ประเภทที่แยกจากกันคือตัวปรับแรงดันไฟฟ้ากระแสสลับ โคลงประกอบด้วยหม้อแปลงที่มีขดลวดจำนวนมาก
วงจรกันโคลง DC
เครื่องชาร์จไทริสเตอร์ 24 โวลต์
ไปยังแหล่งจ่ายแรงดันไฟฟ้า 24 โวลต์ หลักการทำงานคือการชาร์จตัวเก็บประจุและไทริสเตอร์ที่ถูกล็อค และเมื่อตัวเก็บประจุถึงแรงดันไฟฟ้า ไทริสเตอร์จะส่งกระแสไปที่โหลด
กระบวนการสัญญาณตามสัดส่วน
สัญญาณมาถึงการป้อนกลับแบบฟอร์มอินพุตของระบบ มาดูอย่างใกล้ชิดโดยใช้ไมโครวงจร
ชิป TDA 1085
ชิป TDA 1085 ดังภาพด้านบนให้การควบคุมป้อนกลับของมอเตอร์ 12V, 24V โดยไม่สูญเสียพลังงาน จำเป็นต้องมีเครื่องวัดวามเร็วซึ่งจะส่งข้อเสนอแนะจากเครื่องยนต์ไปยังแผงควบคุม สัญญาณเซ็นเซอร์รักษาเสถียรภาพไปที่วงจรไมโครซึ่งส่งงานไปยังองค์ประกอบกำลัง - เพื่อเพิ่มแรงดันไฟฟ้าให้กับมอเตอร์ เมื่อเพลาถูกโหลด บอร์ดจะเพิ่มแรงดันไฟฟ้าและกำลังเพิ่มขึ้น เมื่อปล่อยเพลา ความตึงจะลดลง การปฏิวัติจะคงที่ แต่แรงบิดของกำลังจะไม่เปลี่ยนแปลง ความถี่ถูกควบคุมในช่วงกว้าง มีการติดตั้งมอเตอร์ขนาด 12, 24 โวลต์ในเครื่องซักผ้า
ด้วยมือของคุณเองคุณสามารถสร้างอุปกรณ์สำหรับเครื่องบด, เครื่องกลึงไม้, เครื่องเหลา, เครื่องผสมคอนกรีต, เครื่องตัดฟาง, เครื่องตัดหญ้า, เครื่องแยกไม้และอื่น ๆ อีกมากมาย
ตัวควบคุมทางอุตสาหกรรมซึ่งประกอบด้วยตัวควบคุม 12, 24 โวลต์เต็มไปด้วยเรซิน ดังนั้นจึงไม่สามารถซ่อมแซมได้ ดังนั้นอุปกรณ์ 12V มักจะทำแยกกัน ตัวเลือกง่าย ๆ โดยใช้ชิป U2008B คอนโทรลเลอร์ใช้การตอบรับปัจจุบันหรือซอฟต์สตาร์ท หากใช้อย่างหลัง จำเป็นต้องมีองค์ประกอบ C1, R4 ไม่จำเป็นต้องใช้จัมเปอร์ X1 แต่จะมีการป้อนกลับในทางกลับกัน
เมื่อประกอบตัวควบคุม ให้เลือกตัวต้านทานที่เหมาะสม เนื่องจากตัวต้านทานขนาดใหญ่อาจมีการกระตุกที่จุดเริ่มต้น และด้วยตัวต้านทานขนาดเล็ก การชดเชยจะไม่เพียงพอ
สำคัญ! เมื่อทำการปรับตัวควบคุมพลังงาน คุณต้องจำไว้ว่าทุกส่วนของอุปกรณ์เชื่อมต่อกับเครือข่าย AC ดังนั้นจึงต้องปฏิบัติตามข้อควรระวังด้านความปลอดภัย!
ตัวควบคุมความเร็วสำหรับมอเตอร์ 24, 12 โวลต์แบบเฟสเดียวและสามเฟสเป็นอุปกรณ์ที่ใช้งานได้และมีคุณค่าทั้งในชีวิตประจำวันและในอุตสาหกรรม
แผนผังการควบคุมความเร็วรอบเครื่องยนต์
ตัวควบคุมสำหรับมอเตอร์ AC
ด้วย triac BT138-600 อันทรงพลัง คุณสามารถประกอบวงจรสำหรับตัวควบคุมความเร็วมอเตอร์กระแสสลับได้ วงจรนี้ออกแบบมาเพื่อควบคุมความเร็วในการหมุนของมอเตอร์ไฟฟ้าของเครื่องเจาะ พัดลม เครื่องดูดฝุ่น เครื่องเจียร ฯลฯ สามารถปรับความเร็วของมอเตอร์ได้โดยการเปลี่ยนความต้านทานของโพเทนชิออมิเตอร์ P1 พารามิเตอร์ P1 กำหนดเฟสของทริกเกอร์พัลส์ซึ่งจะเปิดไตรแอค วงจรยังทำหน้าที่รักษาเสถียรภาพซึ่งรักษาความเร็วของเครื่องยนต์แม้ภายใต้ภาระหนัก
แผนผังของตัวควบคุมมอเตอร์กระแสสลับ

ตัวอย่างเช่น เมื่อมอเตอร์ของเครื่องเจาะทำงานช้าลงเนื่องจากความต้านทานของโลหะที่เพิ่มขึ้น EMF ของมอเตอร์ก็จะลดลงเช่นกัน สิ่งนี้นำไปสู่การเพิ่มขึ้นของแรงดันไฟฟ้าใน R2-P1 และ C3 ทำให้ไทรแอกเปิดเป็นเวลานานขึ้น และความเร็วก็เพิ่มขึ้นตามไปด้วย

ตัวควบคุมสำหรับมอเตอร์กระแสตรง
วิธีที่ง่ายและเป็นที่นิยมมากที่สุดในการปรับความเร็วการหมุนของมอเตอร์กระแสตรงนั้นขึ้นอยู่กับการใช้การปรับความกว้างพัลส์ ( พีเอ็มดับเบิลยู หรือ พีเอ็มดับเบิลยู - ในกรณีนี้แรงดันไฟฟ้าจะจ่ายให้กับมอเตอร์ในรูปของพัลส์ อัตราการทำซ้ำของพัลส์ยังคงที่ แต่ระยะเวลาของพัลส์สามารถเปลี่ยนแปลงได้ - ดังนั้นความเร็ว (กำลัง) ก็เปลี่ยนแปลงเช่นกัน

ในการสร้างสัญญาณ PWM คุณสามารถใช้วงจรที่ใช้ชิป NE555 วงจรที่ง่ายที่สุดของตัวควบคุมความเร็วมอเตอร์กระแสตรงแสดงในรูป:
แผนผังของตัวควบคุมมอเตอร์ไฟฟ้ากำลังคงที่

ในที่นี้ VT1 เป็นทรานซิสเตอร์เอฟเฟกต์สนามชนิด n ที่สามารถทนต่อกระแสมอเตอร์สูงสุดที่แรงดันไฟฟ้าและโหลดเพลาที่กำหนด VCC1 คือ 5 ถึง 16 V, VCC2 มากกว่าหรือเท่ากับ VCC1 ความถี่ของสัญญาณ PWM สามารถคำนวณได้โดยใช้สูตร:
โดยที่ R1 อยู่ในหน่วยโอห์ม C1 อยู่ในหน่วยฟารัด
ด้วยค่าที่ระบุในแผนภาพด้านบน ความถี่ของสัญญาณ PWM จะเท่ากับ:
เอฟ = 1.44/(50000*0.0000001) = 290 เฮิรตซ์
เป็นที่น่าสังเกตว่าแม้แต่อุปกรณ์สมัยใหม่รวมถึงอุปกรณ์ที่มีอำนาจควบคุมสูงก็ยังใช้วงจรดังกล่าวอย่างแม่นยำ โดยธรรมชาติแล้วการใช้องค์ประกอบที่ทรงพลังกว่าซึ่งสามารถต้านทานกระแสสูงได้
PWM - ตัวควบคุมความเร็วรอบเครื่องยนต์บนตัวจับเวลา 555
 ตัวจับเวลา 555 ใช้กันอย่างแพร่หลายในอุปกรณ์ควบคุม เช่น ใน PWM - ตัวควบคุมความเร็วสำหรับมอเตอร์กระแสตรง
ตัวจับเวลา 555 ใช้กันอย่างแพร่หลายในอุปกรณ์ควบคุม เช่น ใน PWM - ตัวควบคุมความเร็วสำหรับมอเตอร์กระแสตรง
ใครเคยใช้ไขควงไร้สายคงเคยได้ยินเสียงดังมาจากด้านใน นี่คือเสียงหวีดของขดลวดมอเตอร์ภายใต้อิทธิพลของแรงดันพัลส์ที่สร้างโดยระบบ PWM
เป็นการไม่เหมาะสมที่จะควบคุมความเร็วของเครื่องยนต์ที่เชื่อมต่อกับแบตเตอรี่ด้วยวิธีอื่นแม้ว่าจะเป็นไปได้ก็ตาม ตัวอย่างเช่น เพียงเชื่อมต่อรีโอสแตตทรงพลังแบบอนุกรมกับมอเตอร์ หรือใช้ตัวควบคุมแรงดันไฟฟ้าเชิงเส้นแบบปรับได้พร้อมหม้อน้ำขนาดใหญ่
ตัวแปรของตัวควบคุม PWM ที่ใช้ตัวจับเวลา 555 จะแสดงในรูปที่ 1
วงจรนี้ค่อนข้างเรียบง่ายและใช้มัลติไวเบรเตอร์ แม้ว่าจะแปลงเป็นเครื่องกำเนิดพัลส์ที่มีรอบการทำงานที่ปรับได้ ซึ่งขึ้นอยู่กับอัตราส่วนของประจุและอัตราการคายประจุของตัวเก็บประจุ C1
ตัวเก็บประจุถูกชาร์จผ่านวงจร: +12V, R1, D1, ด้านซ้ายของตัวต้านทาน P1, C1, GND และตัวเก็บประจุจะคายประจุไปตามวงจร: แผ่นบน C1, ด้านขวาของตัวต้านทาน P1, ไดโอด D2, พิน 7 ของตัวจับเวลา, แผ่นด้านล่าง C1 ด้วยการหมุนแถบเลื่อนของตัวต้านทาน P1 คุณสามารถเปลี่ยนอัตราส่วนของความต้านทานของชิ้นส่วนด้านซ้ายและขวาได้รวมถึงเวลาในการชาร์จและการคายประจุของตัวเก็บประจุ C1 และผลที่ตามมาก็คือรอบการทำงานของพัลส์

รูปที่ 1. วงจร PWM - ตัวควบคุมบนตัวจับเวลา 555
โครงการนี้ได้รับความนิยมมากจนมีอยู่แล้วในรูปแบบชุดดังแสดงในรูปต่อไปนี้


รูปที่ 2 แผนผังของชุดตัวควบคุม PWM
ไดอะแกรมการกำหนดเวลาจะแสดงที่นี่เช่นกัน แต่น่าเสียดายที่ค่าชิ้นส่วนจะไม่แสดง สามารถดูได้ในรูปที่ 1 ซึ่งเป็นสาเหตุที่แสดงไว้ที่นี่ แทนที่จะใช้ทรานซิสเตอร์แบบไบโพลาร์ TR1 โดยไม่ต้องเปลี่ยนวงจรคุณสามารถใช้เอฟเฟกต์สนามอันทรงพลังซึ่งจะเพิ่มกำลังโหลด
อย่างไรก็ตามมีองค์ประกอบอื่นปรากฏในแผนภาพนี้ - ไดโอด D4 โดยมีวัตถุประสงค์คือเพื่อป้องกันการคายประจุของตัวเก็บประจุเวลา C1 ผ่านแหล่งพลังงานและโหลด - มอเตอร์ สิ่งนี้ทำให้มั่นใจได้ถึงความเสถียรของความถี่ PWM
อย่างไรก็ตามด้วยความช่วยเหลือของวงจรดังกล่าวคุณสามารถควบคุมได้ไม่เพียง แต่ความเร็วของมอเตอร์กระแสตรงเท่านั้น แต่ยังควบคุมเพียงแค่โหลดที่ใช้งานอยู่ - หลอดไส้หรือองค์ประกอบความร้อนบางชนิด

รูปที่ 3 แผงวงจรพิมพ์ของชุดควบคุม PWM
หากคุณทำงานเพียงเล็กน้อยก็ค่อนข้างเป็นไปได้ที่จะสร้างสิ่งนี้ขึ้นมาใหม่โดยใช้หนึ่งในโปรแกรมสำหรับวาดแผงวงจรพิมพ์ แม้ว่าจะมีชิ้นส่วนจำนวนน้อย แต่จะง่ายกว่าในการประกอบสำเนาหนึ่งชุดโดยใช้การติดตั้งแบบบานพับ

รูปที่ 4 ลักษณะที่ปรากฏของชุดตัวควบคุม PWM
จริงอยู่ชุดแบรนด์ที่ประกอบแล้วดูค่อนข้างดี
บางทีอาจมีคนถามคำถาม: “โหลดในหน่วยงานกำกับดูแลเหล่านี้เชื่อมต่อระหว่าง +12V และตัวสะสมของทรานซิสเตอร์เอาท์พุต แต่แล้วอย่างเช่น ในรถยนต์ เพราะทุกสิ่งในนั้นเชื่อมต่อกับพื้นดิน ตัวถัง และของรถอยู่แล้ว”
ใช่ คุณไม่สามารถโต้เถียงกับมวลได้ ที่นี่เราแนะนำให้เลื่อนสวิตช์ทรานซิสเตอร์ไปที่ช่องว่าง "บวก" เท่านั้น สายไฟ เวอร์ชันที่เป็นไปได้ของโครงร่างดังกล่าวจะแสดงในรูปที่ 5

รูปที่ 6 แสดงระยะเอาต์พุต MOSFET แยกกัน ท่อระบายน้ำของทรานซิสเตอร์เชื่อมต่อกับแบตเตอรี่ +12V ประตูเพิ่งแขวน 9raquo ในอากาศ (ซึ่งไม่แนะนำ) โหลดจะเชื่อมต่อกับวงจรแหล่งกำเนิดในกรณีของเราคือหลอดไฟ รูปนี้แสดงเพียงเพื่ออธิบายวิธีการทำงานของทรานซิสเตอร์ MOSFET

ในการเปิดทรานซิสเตอร์ MOSFET ก็เพียงพอแล้วที่จะจ่ายแรงดันบวกให้กับเกตที่สัมพันธ์กับแหล่งกำเนิด ในกรณีนี้หลอดไฟจะสว่างเต็มที่และจะส่องสว่างจนกระทั่งทรานซิสเตอร์ปิด
ในรูปนี้ วิธีที่ง่ายที่สุดในการปิดทรานซิสเตอร์คือการลัดวงจรเกตไปยังแหล่งกำเนิด และการปิดแบบแมนนวลนั้นค่อนข้างเหมาะสำหรับการตรวจสอบทรานซิสเตอร์ แต่ในวงจรจริงโดยเฉพาะวงจรพัลส์คุณจะต้องเพิ่มรายละเอียดเพิ่มเติมเล็กน้อยดังแสดงในรูปที่ 5
ดังที่ได้กล่าวไว้ข้างต้น จำเป็นต้องใช้แหล่งจ่ายแรงดันไฟฟ้าเพิ่มเติมเพื่อเปิดทรานซิสเตอร์ MOSFET ในวงจรของเราบทบาทของมันถูกเล่นโดยตัวเก็บประจุ C1 ซึ่งถูกชาร์จผ่านวงจร +12V, R2, VD1, C1, LA1, GND
ในการเปิดทรานซิสเตอร์ VT1 ต้องใช้แรงดันไฟฟ้าบวกจากตัวเก็บประจุที่มีประจุ C2 ที่เกต เห็นได้ชัดว่าสิ่งนี้จะเกิดขึ้นเฉพาะเมื่อทรานซิสเตอร์ VT2 เปิดอยู่เท่านั้น และสิ่งนี้จะเกิดขึ้นได้ก็ต่อเมื่อปิดทรานซิสเตอร์ออปโตคัปเปลอร์ OP1 จากนั้นแรงดันบวกจากแผ่นบวกของตัวเก็บประจุ C2 ผ่านตัวต้านทาน R4 และ R1 จะเปิดทรานซิสเตอร์ VT2
ในขณะนี้ สัญญาณอินพุต PWM จะต้องอยู่ในระดับต่ำและบายพาสไฟ LED ของออปโตคัปเปลอร์ (สวิตช์ LED นี้มักเรียกว่าอินเวอร์ส) ดังนั้นไฟ LED ของออปโตคัปเปลอร์จะปิดและทรานซิสเตอร์ปิดอยู่
หากต้องการปิดทรานซิสเตอร์เอาท์พุต คุณต้องเชื่อมต่อเกตเข้ากับแหล่งกำเนิด ในวงจรของเรา สิ่งนี้จะเกิดขึ้นเมื่อทรานซิสเตอร์ VT3 เปิด และจำเป็นต้องเปิดทรานซิสเตอร์เอาท์พุตของออปโตคัปเปลอร์ OP1
สัญญาณ PWM ในเวลานี้อยู่ในระดับสูงดังนั้น LED จะไม่ถูกแบ่งและปล่อยรังสีอินฟราเรดที่กำหนดออกไป ทรานซิสเตอร์ออปโตคัปเปลอร์ OP1 เปิดอยู่ ซึ่งส่งผลให้โหลดปิด - หลอดไฟ
หนึ่งในตัวเลือกสำหรับการใช้โครงร่างดังกล่าวในรถยนต์คือไฟวิ่งกลางวัน ในกรณีนี้ผู้ขับขี่รถยนต์อ้างว่าใช้ไฟสูงที่เปิดอยู่เต็มกำลัง การออกแบบเหล่านี้ส่วนใหญ่มักอยู่บนไมโครคอนโทรลเลอร์ มีมากมายบนอินเทอร์เน็ต แต่ทำได้ง่ายกว่าด้วยตัวจับเวลา NE555
j&;ช่างไฟฟ้า Ino - วิศวกรรมไฟฟ้าและอิเล็กทรอนิกส์ ระบบอัตโนมัติในบ้าน l&บทความเกี่ยวกับการก่อสร้างและซ่อมแซมสายไฟภายในบ้าน ปลั๊กไฟและสวิตช์ สายไฟและสายเคเบิล และแหล่งที่มา l&;veta การกระทำที่น่าสนใจ และอื่นๆ อีกมากมายสำหรับช่างไฟฟ้าและผู้สร้างบ้าน .
ข้อมูลและเอกสารการฝึกอบรมสำหรับช่างไฟฟ้าอื่นๆ
กุญแจ ตัวอย่าง และวิธีแก้ปัญหาทางเทคนิค ภาพรวมของนวัตกรรมทางไฟฟ้าที่น่าสนใจ
ข้อมูลบนเว็บไซต์ j&;ช่างไฟฟ้า มีอยู่ในเอกสารข้อมูลและการศึกษา การดูแลระบบเว็บไซต์จะไม่รับผิดชอบต่อการใช้ข้อมูลนี้ ทรายสามารถรับวัสดุ 12+ ได้
ห้ามทำซ้ำ l&;ite k&;วัสดุ