Controllore PWM. Modulazione dell'ampiezza dell'impulso. Schema. Utilizzo del PWM a bassa tensione negli stabilizzatori di tensione di commutazione Convertitore PWM con stabilizzazione di corrente
Leggi anche
Riso. 40
Riso. 39
Riso. 38
Riso. 37
Nota: maggiori dettagli sul microcircuito stesso e sul principio del suo funzionamento sono mostrati ulteriormente nel paragrafo 2.4.2. - Controller PWM su IC TL494.
Stabilizzatori di tensione di commutazione basati su IC TL494.
La tensione di rampa viene spesso ottenuta da un dispositivo separato: un generatore di tensione di rampa (RVG).
La frequenza della tensione a dente di sega è determinata da RC catena e di solito F gpn = cost, ma, se necessario, modificando i parametri RCè possibile impostare (regolare) la frequenza richiesta.
È noto che la frequenza di commutazione del dispositivo di commutazione è i transistor VT 2, VT 3 nell'ISN con PWM è costante (è impostato dal GPG). Sotto l'influenza di fattori destabilizzanti, la tensione sul resistore esterno cambia R 9 e, di conseguenza, all'uscita dell'amplificatore differenziale U upt, che porta ad una variazione della durata dello stato aperto dei transistor VT 2, VT 3 regolatori e la tensione all'uscita dello stabilizzatore di impulsi rimane invariata.
3.7.3 Controller PWM serie TL494
Attualmente, sul mercato sono ampiamente rappresentati i microcircuiti (domestici e importati), che implementano una serie diversa di funzioni di controllo PWM per compiti specifici. I controller PWM della serie TL494 (analogo domestico di KR1114EU4) si sono dimostrati efficaci. La loro descrizione dettagliata è riportata in. Questi microcircuiti forniscono capacità estese nello sviluppo di sistemi di alimentazione elettrica e implementano una serie completa di funzioni di controllo PWM. Il microcircuito genera una tensione di riferimento, amplificando il segnale di errore, generando una tensione a dente di sega, modulazione PWM, generando un'uscita push-pull, protezione contro correnti passanti e sovraccarichi, sincronizzazione esterna, un ampio intervallo di regolazione, fornisce avvio graduale e possibilità di esterno Attivazione.
principali parametri e caratteristiche del chip TL494:
· tensione di alimentazione Uсс – 7…40 V;
· la tensione sui collettori dei transistor a chiave chiusa non è superiore a 40 V;
· corrente dei transistor chiave di uscita – 250 mA;
· tensione di riferimento – 5 V ± 5%;
· potenza dissipata totale in modalità continua (caso DIP-16.T a<25 ºС) – не более 1000 мВт;
intervallo di temperatura ambiente operativa:
· con suffisso L – da −25…+85 ºС;
· con suffisso C – da 0…+70 ºС.
· corrente attraverso l'uscita di feedback – non più di 0,3 mA;
· capacità del condensatore di temporizzazione St – 0,047…10000 nF;
· resistenza del resistore di temporizzazione – 1,8...500 kOhm;
· frequenza del generatore – 1…300 kHz;
· consumo di corrente del microcircuito – non più di 20 mA;
· fronte dell'impulso di corrente in uscita – non più di 200 ns;
· declino dell'impulso di corrente in uscita – non più di 100 ns.
Inoltre, i driver di uscita a transistor indipendenti del microcircuito offrono la possibilità di far funzionare lo stadio di uscita utilizzando un circuito di emettitore comune o un circuito inseguitore di emettitore.
3.1.1. Diagramma schematico di un abbassamento dell'impulso
stabilizzatore su IC TL494
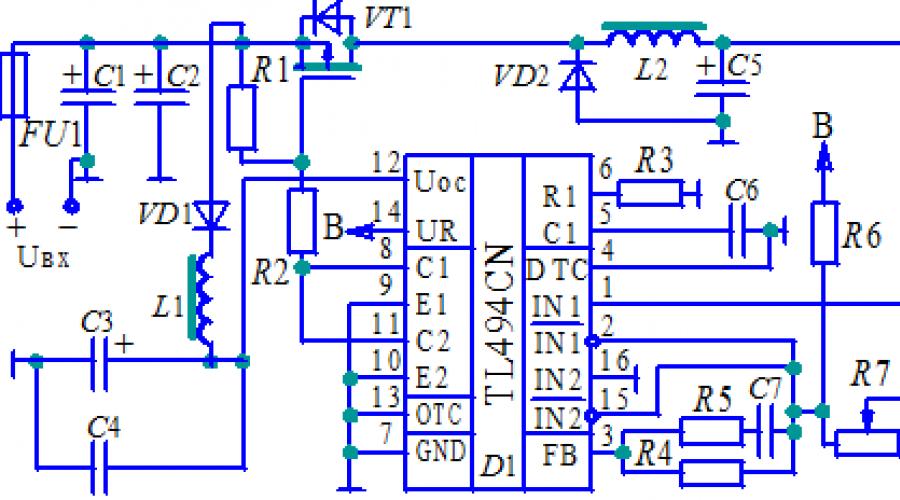
Nell'offerta su riso. 37 stabilizzatore, la tensione di ingresso massima è 30 V, è limitata dalla tensione drain-source massima consentita del transistor ad effetto di campo a canale p VT 1 RFP60P03 di Mitsubishi Electric. Resistore R 3 e condensatore CON 6 imposta la frequenza del generatore di tensione a dente di sega interno, è determinata dalla formula

SU riso. 37 dichiarato: VD 1-KD212A; VD 2-2D2998B; VT 1-RFP60PO3; C 1, C2-2200μ×40 V; C 3-10μ×63V; C 4-0,1 micron; C 5-1000 µ×25 V; C 6-4700;C 7-0,1 micron; F.U. 1-MF R400; R 1-200 Ohm, 0,125 W; R 2-510 Ohm, 0,5 W; R 3-30 kOhm, 0,125 W; R 4-1 milioni, 0,125 W; R 5-47 kOhm, 0,125 W; R 6-4,7 kOhm, 0,125 W; R 7-4,7 kOhm; R 8-5,6 kOhm, 0,125 W; R 9-1 kOhm, 0,125 W; l 1-80 µH; I-6A; Uin =24 V; U uscita =0…11 V.
Dalla sorgente di tensione di riferimento (pin 14) attraverso un partitore resistivo R 6, R 7, parte della tensione di riferimento viene fornita all'ingresso invertente dell'amplificatore di errore n. 1 (pin 2). Segnale di feedback tramite divisore R 8, R 9 viene fornito all'ingresso non invertente dell'amplificatore di errore (pin 1) del microcircuito. La tensione di uscita è regolata dal resistore R 7. Resistore R 5 e condensatore CON 7 eseguire la correzione della frequenza dell'amplificatore di errore.
Va notato che indipendente I driver di uscita del microcircuito assicurano il funzionamento dello stadio di uscita sia in modalità push-pull che a ciclo singolo. Nello stabilizzatore, il driver di uscita del microcircuito è acceso in modalità a ciclo singolo. Per fare ciò, il pin 13 è collegato a un filo comune. Due transistor di uscita (collettori - pin 8, 11; rispettivamente, emettitori - pin 9, 10) sono collegati secondo un circuito di emettitore comune e funzionano in parallelo. In questo caso la frequenza di uscita è uguale alla frequenza del generatore. Lo stadio di uscita del microcircuito attraverso un divisore resistivo R 1, R 2 controlla l'elemento chiave dello stabilizzatore FE: un transistor ad effetto di campo VT 1. Nel circuito di alimentazione del microcircuito (pin 12). Per sopprimere varie interferenze ad alta frequenza e un funzionamento più stabile dello stabilizzatore nel suo insieme, è acceso L.C.-filtro sugli elementi l 1, C 3, C 4. Come si può vedere dallo schema elettrico dello stabilizzatore, quando si utilizza il chip TL494 è necessario un numero relativamente piccolo di elementi esterni.
Un fusibile autoripristinante viene utilizzato per proteggere lo stabilizzatore dalla sovracorrente F.U. 1 MF-R400 di Bourns. Il principio di funzionamento di tali fusibili si basa sulla proprietà di aumentare bruscamente la loro resistenza quando viene superato un certo valore di soglia di corrente o di temperatura ambiente e di ripristinare automaticamente le loro proprietà quando queste cause vengono eliminate. Di seguito le specifiche tecniche del suddetto fusibile:
· tensione operativa massima – 30 V;
· corrente massima che non comporta modifiche dei parametri del fusibile – 4 A;
· corrente che porta ad un salto di resistenza – 8 A;
· intervallo di temperatura operativa – da −40 a +85 ºС.
È stato possibile ridurre le perdite di commutazione e aumentare l'efficienza dello stabilizzatore grazie all'utilizzo di un diodo Schottky ( VD 2) KD2998B con parametri:
· tensione diretta costante – 0,54 V;
· corrente diretta media – 30 A;
· gamma di frequenza senza riduzione dei parametri elettrici – 10..200 kHz;
· tensione inversa ad impulso – 30 V.
Principali caratteristiche tecniche dello stabilizzatore step-down (Fig. 37)
· Voltaggio in ingresso – 24 V;
· Tensione di uscita – 0…11 V;
· Corrente di carico massima – 6 A;
· Ampiezza dell'ondulazione della tensione di uscita – non più di 100 mV;
· Instabilità dell'uscita quando si modifica la corrente di carico e la temperatura ambiente – non più dell'1%;
· Il valore medio di efficienza alla massima corrente di carico su tutto il range della tensione di uscita è di circa il 90%;
È stato stabilito sperimentalmente che lo stabilizzatore ha la massima efficienza (≈90%) ad una frequenza di 12 kHz, ma con una potenza di uscita di circa 40 W si osserva un fischio appena percettibile. Il fischio scompare se si aumenta la frequenza di conversione a 20 kHz (con una diminuzione dell'efficienza del 2...3%). L'efficienza con potenza di uscita fino a 10 W (U out = 10 V) raggiunge il 93%.
L'induttore L2 è avvolto su due nuclei magnetici ad anello MP-140 K24×13×6,5 piegati insieme e contiene 45 spire di filo PETV-2 con un diametro di 1,1 mm, disposti uniformemente in due strati attorno all'intero perimetro dell'anello. Tra gli strati dovrebbero essere posati due strati di tessuto verniciato LShMS-105-0.06 GOST 2214-78. L'induttanza dello starter è di 220 µH. Resistori – C2-33N. Condensatori CON 1, CON 2, CON 3, CON 5 – K50-35, CON 4, CON 6, CON 7 – K10-17. Resistori variabili: SP5-3 o SP5-2VA. Il chip TL494CN può essere sostituito con un TL494LN o KR1114EU4. Acceleratore l 1 – DM-0,1 con induttanza 80 μH. Il fusibile autoripristinante della serie MF-R può essere selezionato per ciascun caso specifico. Diodo VD 2 può essere sostituito con qualsiasi altro diodo Schottky con parametri non peggiori di quelli sopra, ad esempio 20TQ045.
Nello stabilizzatore l'unità di protezione da sovracorrente può essere progettata diversamente. Il TL494 è dotato di amplificatore di errore n. 2 (I/O invertente 15, I/O non invertente 16). Le uscite di entrambi gli amplificatori di errore sono attive alte e collegate in OR all'ingresso non invertente del comparatore PWM. In questa configurazione, l'amplificatore che richiede il minor tempo per attivare l'uscita è l'amplificatore dominante nel circuito di guadagno.
Viene mostrato un frammento del circuito stabilizzatore con un'unità di protezione da sovracorrente riso. 38 .

Resistori paralleli R 12-R 14 che fungono da sensore di corrente sono collegati in serie al carico. La tensione dal sensore di corrente viene fornita all'ingresso non invertente (pin 16) dell'amplificatore di errore n. 2. Il valore di soglia della corrente (tensione all'ingresso invertente dell'amplificatore, pin 15) nel carico è impostato dal divisore R 10, R 11.
SU riso. 38 dichiarato: VD 2-2D2998B; C 5-1000 µ×25 V; C 6-4700;C 7-0,1 micron; R 3-30 kOhm, 0,125 W; R 4-1 milioni, 0,125 W; R 5-47 kOhm, 0,125 W; R 6-4,7 kOhm, 0,125 W; R 7-4,7 kOhm; R 8-5,6 kOhm, 0,125 W; R 9-1 kOhm, 0,125 W; R 10-4,7 kOhm, 0,125 W; R 11-270 Ohm; R 12, R 13, R 14-0,1 kOhm, 1 W; l 1-80 µH; I-6A; Uout = 0…11 V.
Non appena la corrente nel carico supera il valore di soglia impostato e l'amplificatore di errore n. 2 del microcircuito diventa dominante nel circuito di controllo, lo stabilizzatore inizierà a funzionare in modalità di stabilizzazione della corrente. Se la corrente di carico è inferiore al valore di soglia, lo stabilizzatore passerà nuovamente alla modalità di stabilizzazione della tensione. Per ridurre le perdite di potenza, il sensore di corrente è realizzato con una resistenza minima di 0,03 Ohm: con una corrente di carico massima di 6 A, la potenza dissipata sul sensore
è solo 1,08 W. Resistori R 12...R 14 – tipo S5-16MV 1 W, 0,1 Ohm ± 1%. Resistore R 11 – SP5-3 o SP5-2VA. Se necessario, per ridurre le perdite, è possibile ridurre ulteriormente la resistenza del sensore di corrente.
Lo stabilizzatore è realizzato su una tavola di dimensioni 55x55 mm. Durante l'installazione, è consigliabile separare il filo comune della parte di potenza dello stabilizzatore e il filo comune del microcircuito e collegarli all'uscita dello stabilizzatore, oltre a ridurre al minimo la lunghezza dei conduttori (soprattutto la parte di potenza) .
Il transistor è installato su un radiatore con una superficie effettiva di almeno 110 cm2. Lo stabilizzatore non necessita di regolazione se installato correttamente. In uno stabilizzatore con unità di protezione da sovracorrente (Fig. 38), è necessario impostare la tensione sul pin 15 del microcircuito, che viene calcolata con la formula: U 15 = I × R, dove I è la corrente di carico massima; R– resistenza del sensore di corrente.
Inizialmente senza carico del resistore R 11 è necessario impostare la tensione richiesta U per corrente di carico massima (per corrente Ipore = 8 A, U = 0,24 V). È meglio accendere la prima volta con un carico di 0,2...0,4 A. Quindi aumentare lentamente la tensione di uscita al valore massimo e quindi, aumentando la corrente di carico, controllare la transizione dello stabilizzatore alla modalità di stabilizzazione di corrente.
Invece del transistor RFP60P03, è possibile utilizzare il più economico RFP10P03, ma l'uso di un elemento base più economico può portare a un deterioramento delle caratteristiche tecniche dello stabilizzatore.
3.1.2. Diagramma schematico di un aumento dell'impulso
stabilizzatore su IC TL494

In alcuni casi, è necessario che la tensione di uscita dello stabilizzatore sia superiore a quella di ingresso. SU riso. 39 Viene mostrato lo schema a blocchi di uno stabilizzatore di impulsi parallelo di tipo boost.
In questo stabilizzatore di impulsi, quando l'elemento chiave del FE è aperto, la corrente proviene dalla sorgente U l'input scorre attraverso l'acceleratore l 1, immagazzinando energia in esso. Diodo VD 1 è chiuso. La corrente al carico durante questo periodo di tempo proviene solo dal condensatore CON 1 .
SU riso. 39 dichiarato: VD 1-KD212A; VD 2-2D2998B; VT 1-IRFP540; C 1, C2-2200μ×40 V; C 3-10μ×63V; C 4-0,1 micron; C 5, C 6-3300μ×63 V; C 7-4700; CON 8-0,1 micron; CON 9-1000 µ×25 V; F.U. 1-MF R400; R 1-1 kOhm, 0,25 W; R 2-750 Ohm, 0,25 W; R 3-30 kOhm, 0,125 W; R 4-1 milioni, 0,125 W; R 5-47 kOhm, 0,125 W; R 6-4,7 kOhm, 0,125 W; R 7-4,7 kOhm; R 8-150 kOhm, 0,125 W; R 9-4,7 kOhm, 0,125 W; l 1-80 µH; I-1.4A; Uin =24 V; U uscita =26,5…50 V.
Nel momento successivo, quando il CE si chiude, l'energia dell'induttore l 1 è dato al carico. In questo caso, la tensione di uscita sarà maggiore della tensione di ingresso. A differenza di uno stabilizzatore buck ( riso. 38 ) qui l'induttore non è un elemento filtrante e la tensione di uscita diventa maggiore della tensione di ingresso di un valore determinato dall'induttanza dell'induttore l 1 e il ciclo di lavoro dell'elemento chiave della FE.
Nello stabilizzatore acceso riso. 39 Fondamentalmente vengono utilizzati gli stessi radioelementi di quello discusso in precedenza.
Principali caratteristiche tecniche dello stabilizzatore boost:
· Voltaggio in ingresso – 24 V;
· Tensione di uscita – 26,5…50 V;
· Corrente di carico massima (a U out = 50 V) – 1,4 A;
· Ampiezza dell'ondulazione della tensione di uscita – non più di 200 mV;
· Instabilità dell'uscita quando si modifica la corrente di carico e la temperatura ambiente – 1,5%;
· Il valore medio di efficienza alla massima corrente di carico su tutto il range della tensione di uscita è di circa il 9,2%;
· Frequenza di conversione – 15 kHz;
· Intervallo di temperatura operativa – da −25 a +85 ºС;
· L'ampiezza dell'ondulazione della tensione di uscita dello stabilizzatore al carico massimo è di circa 200 mV.
È possibile ridurre l'ondulazione aumentando la capacità del filtro di uscita. Per un avvio “più morbido”, un condensatore è collegato tra il filo comune e l'ingresso non invertente dell'amplificatore di errore n. 1 (pin 1) CON 9. Per proteggere lo stabilizzatore dalle sovracorrenti è possibile utilizzare l'unità funzionale mostrata in Fig. 38.
Acceleratore l 2 è lo stesso del circuito stabilizzatore step-down, VT 1 – transistor ad effetto di campo a canale n IRF540 con parametri: Usi = 100 V, Ic = 28 A, Rsi = 0,077 Ohm (valori massimi). Resistori – C2-33N. Condensatori CON 1, CON 2, CON 3, CON 5, CON 6, CON 8, CON 9 – K50-35; CON 4, CON 7, CON 8 – K10-17. Resistori variabili: SP5-3 o SP5-2VA. Transistor VT 1 va installato su un termosifone con superficie effettiva di almeno 100 cm2. È possibile utilizzare un transistor ad effetto di campo a canale n più economico, ovviamente, con qualche deterioramento delle caratteristiche tecniche dello stabilizzatore. È meglio accenderlo per la prima volta con un piccolo carico di 0,1...0,2 A e una tensione di uscita minima, quindi aumentare lentamente la tensione di uscita e la corrente di carico fino ai valori massimi.
Se gli stabilizzatori step-up e step-down funzionano dalla stessa sorgente di tensione, la loro frequenza di conversione può essere sincronizzata. Viene mostrato uno schema di sincronizzazione per due microcircuiti TL494. Per fare ciò, è necessario rimuovere i resistori di temporizzazione e il condensatore nello stabilizzatore slave e cortocircuitare i terminali 6 e 14 del microcircuito e collegare tra loro i terminali 5 dei microcircuiti di entrambi gli stabilizzatori.
In uno stabilizzatore di tipo boost, lo starter l 2 non partecipa all'attenuazione dell'ondulazione della tensione CC in uscita. Negli stabilizzatori di tipo boost, per un filtraggio di alta qualità della tensione CC in uscita, è necessario utilizzare filtri di uscita con valori sufficientemente grandi l E CON. Ciò porta ad un aumento del peso e delle dimensioni del filtro e dell'apparecchio nel suo insieme. Pertanto, la densità di potenza di uno stabilizzatore step-down è maggiore di quella di uno stabilizzatore step-up.
3.1.3. Rappresentazione schematica di un impulso
stabilizzatore invertente su IC TL494
Il diagramma schematico di uno stabilizzatore con inversione di impulsi è mostrato in riso. 40. Questo ISN è realizzato secondo lo schema fornito nel capitolo 2, §2.2.3.

Inoltre, come in uno stabilizzatore step-up, l'induttore, quando CE è aperto, accumula energia e, quando è chiuso, la trasferisce al carico, tuttavia, a causa di un diverso ordine di collegamento degli elementi, lo stabilizzatore ha la proprietà di invertire la polarità della tensione di uscita rispetto alla tensione di ingresso.
SU riso. 40 dichiarato: VD 1-KD212A; VD 2-2D2998B; VT 1-RFP60PO3; C 1, C2-2200μ×40 V; C 3-10μ×63V; C 4-0,1 micron; C 5-1000 µ×25 V; C 6-4700;C 7-220 µx40 V; CON 8-0,1 micron; F.U. 1-MF R400; R 1-200 Ohm, 0,125 W; R 2-510 Ohm, 0,5 W; R 3-1 kOhm, 0,125 W; R 4-4,7 kOhm, 0,125 W; R 5-30 kOhm, 0,125 W; R 6-1 MOhm, 0,125 W; R 7-47 kOhm; R 8-1 kOhm, 0,125 W; R 9-10 kOhm, 0,125 W; R 10-1 kOhm, 0,125 W; R 11-5,6 kOhm, 0,125 W; l 1-80 µH; I-4,5 A; ingresso U = 24 V; Uout =0…11 V.
Lo stabilizzatore invertente utilizza sostanzialmente gli stessi componenti elettronici descritti in precedenza.
Principali caratteristiche tecniche dello stabilizzatore invertente:
· Voltaggio in ingresso – 24 V;
· Voltaggio in uscita – 11 V;
· Corrente di carico massima – 4,5 A;
· Ampiezza dell'ondulazione della tensione di uscita – non più di 150 mV;
· Instabilità dell'uscita quando si modifica la corrente di carico e la temperatura ambiente – 15%;
· Il valore medio di efficienza alla massima corrente di carico sull'intero intervallo di tensione di uscita è dell'80%;
· Frequenza di conversione – 15 kHz;
· Intervallo di temperatura operativa – da −25 a +85 ºС.
Per eliminare i picchi di corrente in ingresso, soprattutto durante il funzionamento con carico pesante, lo stabilizzatore implementa un avvio "soft" grazie all'introduzione R 3 e CON 5.
Transistor VT 1 va installato su un termosifone con superficie effettiva di almeno 140 cm2. Diodo VD 2 sia installato anche su un radiatore con superficie effettiva di almeno 10 cm2.
La tensione di ingresso degli stabilizzatori può essere ridotta o aumentata se si tengono conto di tutti i requisiti di cui sopra per ciascuno stabilizzatore, ma il divisore di corrente deve essere ricalcolato R 1, R 2, in modo che la corrente del divisore e la tensione source-gate del transistor VT 1 non sono cambiati.????
Il chip di controllo degli impulsi KR142EP1 garantisce il funzionamento dell'ISN principalmente in modalità relè on-off, ma l'IC offre anche la possibilità di creare uno stabilizzatore di tensione con modulazione dell'ampiezza dell'impulso.
Ad esempio, se per un motivo o per l'altro è necessario che il funzionamento del dispositivo di soglia sia sincronizzato con la frequenza di un dispositivo esterno, il suo segnale di sincronizzazione viene fornito al pin. 14 e 15 E.S. Spesso come tale dispositivo viene utilizzato un generatore di impulsi rettangolare, un oscillatore principale. La tensione alternata rettangolare di un tale generatore utilizzando una differenziazione RC la catena viene convertita in tensione a dente di sega U Bevuto. In questo caso viene utilizzata la resistenza R 10 microcircuiti e viene utilizzato un condensatore esterno di piccola capacità.
I diodi vengono utilizzati come nodo di ingresso per questo segnale VD 3...VD 6 collegato tra l'amplificatore differenziale e il trigger di Schmitt. Quindi, sul resistore R 10, vengono confrontate due tensioni: la prima è proporzionale alla variazione di tensione attraverso il carico (come nell'ISN con RE) e viene rimossa dal collettore VT 11 Amplificatore differenziale CC U pt, e il secondo è la tensione a dente di sega U Bevuto. Come risultato del confronto di queste tensioni, viene isolato un segnale di errore, che viene fornito allo stadio invertente VT 7.
La tensione a dente di sega deve avere un'oscillazione sufficiente per il trasferimento VT 7 allo stato di saturazione. Quest'ultimo, quando aperto, opera in una modalità prossima alla saturazione. Ritardo di momenti nel tempo in cui VT 7 esce dalla saturazione, rispetto al fronte anteriore della tensione a dente di sega dipende da quanto sono aperti i transistor VT 7,VT 8. Se i transistor sono quasi spenti e la tensione media tra la loro base e l'emettitore, data dal potenziale del collettore VT 8 è piccolo, diventerà uguale alla tensione che diminuisce linearmente all'uscita del raddrizzatore solo alla fine del ciclo.
All'aumentare del potenziale del collettore VT 11 (vale a dire, all'aumentare della tensione attraverso il carico), aumenta anche la tensione U su. Questa tensione corrisponde ad una lunga pausa tra gli impulsi di tensione (durata più breve degli impulsi di tensione) rimossa dal carico dell'emettitore comune dei transistor VT 7,VT 8 - R 9(U B VT 6) microcircuiti.
Transistor VT 6, VT 5, VT 4 sono amplificatori di impulsi prelevati da un resistore R 9. Impulsi amplificati dal collettore VT 4 tramite un partitore di tensione esterno ( R 6, R 3) alimentato alla base VT 3, che è uno dei transistor dell'interruttore incluso nell'IC. Questa chiave ( VT 2, VT 3) controlla l'ISN in questo circuito con un interruttore di alimentazione esterno, anch'esso realizzato sotto forma di transistor composito ( VT 2, VT 3). Pertanto, quando si aumenta, ad esempio, la tensione di alimentazione all'ingresso dell'ISN, la tensione U n = (T E /T)U p sul carico rimarrà invariato poiché il tempo di apertura del transistor di controllo della sezione di potenza è diminuito.
Ogni radioamatore ha familiarità con il microcircuito NE555 (analogo a KR1006). La sua versatilità consente di progettare un'ampia varietà di prodotti fatti in casa: da un semplice impulso a vibratore singolo con due elementi nel cablaggio a un modulatore multicomponente. Questo articolo discuterà il circuito per l'accensione di un timer nella modalità di un generatore di impulsi rettangolare con regolazione dell'ampiezza dell'impulso.
Schema e principio del suo funzionamento
Con lo sviluppo dei LED ad alta potenza, NE555 è entrato nuovamente nell'arena come dimmer, ricordandone gli innegabili vantaggi. I dispositivi basati su di esso non richiedono una profonda conoscenza dell'elettronica, vengono assemblati rapidamente e funzionano in modo affidabile.
È noto che la luminosità di un LED può essere controllata in due modi: analogico e ad impulsi. Il primo metodo prevede la modifica del valore dell'ampiezza della corrente continua attraverso il LED. Questo metodo presenta uno svantaggio significativo: bassa efficienza. Il secondo metodo prevede la modifica dell'ampiezza dell'impulso (fattore di lavoro) della corrente con una frequenza da 200 Hz a diversi kilohertz. A tali frequenze lo sfarfallio dei LED è invisibile all'occhio umano. Nella figura è mostrato il circuito di un regolatore PWM con un potente transistor di uscita. È in grado di funzionare da 4,5 a 18 V, il che indica la capacità di controllare la luminosità sia di un potente LED che di un'intera striscia LED. L'intervallo di regolazione della luminosità varia dal 5 al 95%. Il dispositivo è una versione modificata di un generatore di impulsi rettangolare. La frequenza di questi impulsi dipende dalla capacità C1 e dalle resistenze R1, R2 ed è determinata dalla formula: f=1/(ln2*(R1+2*R2)*C1), Hz
Il principio di funzionamento del controllo elettronico della luminosità è il seguente. Nel momento in cui viene applicata la tensione di alimentazione, il condensatore inizia a caricarsi attraverso il circuito: +Usupply – R2 – VD1 –R1 –C1 – -Usupply. Non appena la tensione raggiunge il livello di 2/3U, il transistor del timer interno si aprirà e inizierà il processo di scarica. La scarica inizia dalla piastra superiore di C1 e prosegue lungo il circuito: R1 – VD2 –7 pin IC – -U alimentazione. Dopo aver raggiunto il segno 1/3U, il transistor di potenza del timer si chiuderà e C1 inizierà nuovamente ad acquisire capacità. Successivamente il processo si ripete ciclicamente formando impulsi rettangolari sul pin 3.
La modifica della resistenza del resistore di regolazione porta ad una diminuzione (aumento) del tempo di impulso sull'uscita del timer (pin 3) e, di conseguenza, il valore medio del segnale di uscita diminuisce (aumenta). La sequenza di impulsi generata viene fornita attraverso il resistore limitatore di corrente R3 al gate VT1, che è collegato secondo un circuito con una sorgente comune. Il carico sotto forma di striscia LED o LED ad alta potenza collegati in sequenza è collegato al circuito di drain aperto VT1.
In questo caso è installato un potente transistor MOSFET con una corrente di drain massima di 13 A. Ciò consente di controllare la luminosità di una striscia LED lunga diversi metri. Ma il transistor potrebbe richiedere un dissipatore di calore.
Il condensatore di blocco C2 elimina l'influenza del rumore che può verificarsi lungo il circuito di alimentazione quando si commuta il timer. Il valore della sua capacità può essere compreso nell'intervallo 0,01-0,1 µF.
Scheda e parti di assemblaggio del controllo della luminosità
 Il circuito stampato monofaccia ha dimensioni di 22x24 mm. Come puoi vedere dall'immagine, non c'è nulla di superfluo che possa sollevare domande.
Il circuito stampato monofaccia ha dimensioni di 22x24 mm. Come puoi vedere dall'immagine, non c'è nulla di superfluo che possa sollevare domande.
Dopo l'assemblaggio, il circuito dimmer PWM non richiede regolazioni e il circuito stampato è facile da realizzare con le proprie mani. La scheda, oltre al resistore di sintonia, utilizza elementi SMD.
- DA1-IC NE555;
- VT1 - transistor ad effetto di campo IRF7413;
- VD1,VD2 – 1N4007;
- R1 – 50 kOhm, rifinitura;
- R2, R3 – 1 kOhm;
- C1 – 0,1 µF;
- C2 – 0,01 µF.
Il transistor VT1 deve essere selezionato in base alla potenza del carico. Ad esempio, per modificare la luminosità di un LED da un watt, sarà sufficiente un transistor bipolare con una corrente di collettore massima consentita di 500 mA.
La luminosità della striscia LED deve essere controllata da una fonte di tensione di +12 V e corrispondere alla sua tensione di alimentazione. Idealmente, il regolatore dovrebbe essere alimentato da un alimentatore stabilizzato appositamente progettato per il nastro.
Il carico sotto forma di singoli LED ad alta potenza viene alimentato in modo diverso. In questo caso, l'alimentazione del dimmer è uno stabilizzatore di corrente (chiamato anche driver LED). La sua corrente di uscita nominale deve corrispondere alla corrente dei LED collegati in serie.
Leggi anche
Avevo bisogno di realizzare un regolatore di velocità per l'elica. Per soffiare via il fumo dal saldatore e ventilare il viso. Bene, solo per divertimento, metti tutto in un prezzo minimo. Il modo più semplice per regolare un motore CC a bassa potenza, ovviamente, è con un resistore variabile, ma per trovare un motore con un valore nominale così piccolo e anche la potenza richiesta, ci vuole un grande sforzo e ovviamente ha vinto non costa dieci rubli. Pertanto, la nostra scelta è PWM + MOSFET.
Ho preso la chiave IRF630. Perché questo MOSFET? Sì, ne ho appena ricevuti una decina da chissà dove. Quindi lo uso, così posso installare qualcosa di più piccolo e a basso consumo. Perché è improbabile che la corrente qui sia superiore a un ampere, ma IRF630 in grado di attraversare se stesso sotto 9A. Ma sarà possibile creare un'intera cascata di fan collegandoli a un ventilatore: potenza sufficiente :)
Ora è il momento di pensare a cosa faremo PWM. Il pensiero suggerisce immediatamente: un microcontrollore. Prendi un po' di Tiny12 e fallo sopra. Ho buttato da parte questo pensiero all'istante.
- Mi dispiace spendere una parte così preziosa e costosa per una specie di fan. Troverò un compito più interessante per il microcontrollore
- Scrivere più software per questo è doppiamente frustrante.
- La tensione di alimentazione è di 12 volt, abbassarla per alimentare il MK a 5 volt è generalmente pigro
- IRF630 non si aprirà a partire da 5 volt, quindi dovresti installare anche qui un transistor in modo che fornisca un potenziale elevato al gate di campo. Fanculo.
Gli amplificatori operazionali possono essere scartati completamente. Il fatto è che per gli amplificatori operazionali per uso generale, già dopo 8-10 kHz, di regola, limite di tensione in uscita inizia a crollare bruscamente e dobbiamo dare uno strattone al fieldman. Inoltre, a una frequenza supersonica, per non cigolare.
Gli amplificatori operazionali senza questo inconveniente costano così tanto che con questi soldi puoi acquistare una dozzina dei microcontrollori più interessanti. Nella fornace!
Ciò che resta sono i comparatori, non hanno la capacità di un amplificatore operazionale di modificare agevolmente la tensione di uscita, possono solo confrontare due tensioni e chiudere il transistor di uscita in base ai risultati del confronto, ma lo fanno rapidamente e senza bloccarsi le caratteristiche. Ho frugato nel fondo del barile e non sono riuscito a trovare nessun comparatore. Imboscata! Più precisamente lo era LM339, ma era in una custodia di grandi dimensioni e la mia religione non mi consente di saldare un microcircuito per più di 8 gambe per un compito così semplice. È stato anche un peccato trascinarmi nel magazzino. Cosa fare?
E poi mi sono ricordato di una cosa così meravigliosa come timer analogico - NE555. È una sorta di generatore in cui è possibile impostare la frequenza, nonché la durata dell'impulso e della pausa, utilizzando una combinazione di resistori e un condensatore. Quante stronzate diverse sono state fatte su questo timer nel corso della sua storia più che trentennale... Finora questo microcircuito, nonostante la sua veneranda età, è stampato in milioni di copie ed è disponibile in quasi tutti i magazzini al prezzo di pochi rubli. Ad esempio, nel nostro paese costa circa 5 rubli. Ho frugato nel fondo del barile e ho trovato un paio di pezzi. DI! Movimentiamo le cose adesso.
 |
Come funziona
Se non approfondisci la struttura del timer 555, non è difficile. In parole povere, il timer monitora la tensione sul condensatore C1, che rimuove dall'uscita THR(SOGLIA - soglia). Non appena raggiunge il massimo (il condensatore è carico), il transistor interno si apre. Il che chiude l'output DIS(SCARICO - scarico) a terra. Allo stesso tempo, all'uscita FUORI appare uno zero logico. Il condensatore inizia a scaricarsi DIS e quando la tensione su di esso diventa zero (scarica completa), il sistema passerà allo stato opposto: all'uscita 1 il transistor è chiuso. Il condensatore ricomincia a caricarsi e tutto si ripete di nuovo.
La carica del condensatore C1 segue il percorso: “ R4->spalla superiore R1 ->D2", e lo scarico lungo la strada: D1 -> braccio inferiore R1 -> DIS. Quando giriamo il resistore variabile R1, cambiamo il rapporto tra le resistenze del braccio superiore e inferiore. Il che, di conseguenza, modifica il rapporto tra la durata dell'impulso e la pausa.
La frequenza è impostata principalmente dal condensatore C1 e dipende anche leggermente dal valore della resistenza R1.
Il resistore R3 assicura che l'uscita sia portata a un livello alto, quindi c'è un'uscita a collettore aperto. Che non è in grado di impostare autonomamente un livello elevato.
È possibile installare qualsiasi diodo, i conduttori hanno approssimativamente lo stesso valore, le deviazioni entro un ordine di grandezza non influiscono particolarmente sulla qualità del lavoro. A 4,7 nanofarad impostati in C1, ad esempio, la frequenza scende a 18 kHz, ma è quasi impercettibile, a quanto pare il mio udito non è più perfetto :(
Ho scavato nei contenitori, che a sua volta calcola i parametri operativi del timer NE555 e da lì ho assemblato un circuito, per la modalità astabile con un fattore di riempimento inferiore al 50%, e ho avvitato un resistore variabile invece di R1 e R2, con cui Ho cambiato il ciclo di lavoro del segnale di uscita. Bisogna solo prestare attenzione al fatto che l'uscita DIS (SCARICA) avviene tramite il tasto del timer interno collegato a terra, quindi non può essere collegato direttamente al potenziometro, Perché ruotando il regolatore nella sua posizione estrema, questo pin si atterrerebbe su Vcc. E quando il transistor si apre, si verificherà un cortocircuito naturale e il timer con un bellissimo zilch emetterà un fumo magico, sul quale, come sai, funziona tutta l'elettronica. Non appena il fumo esce dal chip, questo smette di funzionare. Questo è tutto. Pertanto, prendiamo e aggiungiamo un altro resistore per un chilo-ohm. Non farà alcuna differenza nella regolamentazione, ma proteggerà dal burnout.
Detto fatto. Ho inciso la scheda e saldato i componenti:
Tutto è semplice dal basso.
Qui allego un sigillo, nel layout Sprint nativo -
E questa è la tensione sul motore. È visibile un piccolo processo di transizione. È necessario posizionare il condotto in parallelo a mezzo microfarad e lo appianerà.
Come puoi vedere, la frequenza fluttua: questo è comprensibile, poiché la nostra frequenza operativa dipende dai resistori e dal condensatore e poiché cambiano, la frequenza fluttua, ma questo non ha importanza. Nell'intero campo di controllo non entra mai nel campo udibile. E l'intera struttura costa 35 rubli, senza contare il corpo. Quindi: profitto!
Negli ultimi 10-20 anni, il numero di prodotti elettronici di consumo è aumentato notevolmente. È apparsa un'enorme varietà di componenti elettronici e moduli già pronti. Anche i requisiti di alimentazione sono aumentati; molti richiedono tensione stabilizzata o corrente stabile.
Il driver viene spesso utilizzato come stabilizzatore di corrente per LED e per caricare le batterie delle auto. Una tale fonte ora esiste in ogni faretto, lampada o apparecchio LED. Consideriamo tutte le opzioni di stabilizzazione, da quelle vecchie e semplici a quelle più efficaci e moderne. Sono anche chiamati driver led.

- 1. Tipi di stabilizzatori
- 2. Modelli popolari
- 3. Stabilizzatore per LED
- 4. Driver da 220 V
- 5. Stabilizzatore di corrente, circuito
- 6.LM317
- 7. Stabilizzatore di corrente regolabile
- 8. Prezzi in Cina
Tipi di stabilizzatori
 CC regolabile a impulsi
CC regolabile a impulsi
15 anni fa, nel mio primo anno, ho sostenuto i test sull'argomento "Fonti di alimentazione" per apparecchiature elettroniche. Da allora fino ad oggi, il microcircuito LM317 e i suoi analoghi, che appartengono alla classe degli stabilizzatori lineari, rimangono i più popolari e apprezzati.
Al momento esistono diversi tipi di stabilizzatori di tensione e corrente:
- lineare fino a 10A e tensione di ingresso fino a 40V;
- pulsato con alta tensione di ingresso, step-down;
- impulso con bassa tensione di ingresso, boost.

Su un controller PWM a impulsi, le caratteristiche sono generalmente comprese tra 3 e 7 ampere. In realtà, dipende dal sistema di raffreddamento e dall'efficienza in una modalità particolare. Aumentando una tensione di ingresso bassa si aumenta l'uscita. Questa opzione viene utilizzata per alimentatori con un basso numero di volt. Ad esempio, in un'auto, quando è necessario ricavare 19 V o 45 V da 12 V. Con uno abbassabile è più semplice, l'alto si riduce al livello desiderato.
Leggi tutti i modi per alimentare i LED nell'articolo “12 e 220V”. Gli schemi di collegamento sono descritti separatamente, da quelli più semplici per 20 rubli alle unità a tutti gli effetti con una buona funzionalità.
In base alla funzionalità si dividono in specializzati e universali. I moduli universali solitamente hanno 2 resistenze variabili per regolare l'uscita Volt e Ampere. Quelli specializzati molto spesso non hanno elementi costruttivi e i valori di output sono fissi. Tra quelli specializzati sono comuni gli stabilizzatori di corrente per LED; gli schemi elettrici sono disponibili in grandi quantità su Internet;
Modelli popolari
 Lm2596
Lm2596
L'LM2596 è diventato popolare tra quelli a impulsi, ma per gli standard moderni ha una bassa efficienza. Se è superiore a 1 A, è necessario un radiatore. Un piccolo elenco di quelli simili:
- LM317
- LM2576
- LM2577
- LM2596
- MC34063

Aggiungerò un assortimento cinese moderno, che ha buone caratteristiche, ma è molto meno comune. Su Aliexpress, la ricerca per marcatura aiuta. L'elenco è compilato dai negozi online:
- MP2307DN
- XL4015
- MP1584EN
- XL6009
- XL6019
- XL4016
- XL4005
- L7986A
Adatto anche per luci di marcia diurna cinesi DRL. A causa del loro basso costo, i LED sono collegati tramite un resistore alla batteria dell'auto o alla rete dell'auto. Ma la tensione sale fino a 30 volt a impulsi. I LED di bassa qualità non possono resistere a tali picchi e iniziano a spegnersi. Molto probabilmente, hai visto luci diurne lampeggianti o luci di marcia in cui alcuni LED non funzionano.

Assemblare un circuito con le tue mani utilizzando questi elementi sarà semplice. Si tratta principalmente di stabilizzatori di tensione, che vengono attivati in modalità di stabilizzazione di corrente.
Non confondere la tensione massima dell'intero blocco e la tensione massima del controller PWM. I condensatori a bassa tensione da 20 V possono essere installati sul blocco quando il microcircuito a impulsi ha un ingresso fino a 35 V.
Stabilizzatore per LED

Il modo più semplice per realizzare uno stabilizzatore di corrente per LED con le tue mani è utilizzare LM317, devi solo calcolare la resistenza per il LED utilizzando un calcolatore online. Il cibo può essere utilizzato a portata di mano, ad esempio:
- alimentazione portatile 19V;
- dalla stampante a 24V e 32V;
- dall'elettronica di consumo a 12 volt, 9V.

I vantaggi di un tale convertitore sono il prezzo basso, la facilità di acquisto, il numero minimo di componenti e l'elevata affidabilità. Se l'attuale circuito stabilizzatore è più complesso, assemblarlo con le proprie mani diventa irrazionale. Se non sei un radioamatore, è più facile e veloce acquistare uno stabilizzatore di corrente a impulsi. In futuro, può essere modificato con i parametri richiesti. Puoi saperne di più nella sezione “Moduli già pronti”.
Alimentatore da 220 V

Se sei interessato a un driver per LED da 220 V, è meglio ordinarlo o acquistarlo. Hanno una complessità di produzione media, ma l'installazione richiederà più tempo e richiederà esperienza nell'impostazione.

Il driver LED 220 può essere rimosso da lampade LED, apparecchi di illuminazione e faretti difettosi che dispongono di un circuito LED difettoso. Inoltre è possibile modificare quasi tutti i driver esistenti. Per fare ciò, scopri il modello del controller PWM su cui è assemblato il convertitore. Tipicamente, i parametri di uscita sono impostati da uno o più resistori. Utilizzando la scheda tecnica, guarda quale dovrebbe essere la resistenza per ottenere gli amplificatori richiesti.

Se installi un resistore regolabile del valore calcolato, il numero di Ampere in uscita sarà regolabile. Basta non superare la potenza nominale indicata.
Stabilizzatore di corrente, circuito

Spesso devo sfogliare l'assortimento su Aliexpress alla ricerca di moduli economici ma di alta qualità. La differenza di costo può essere 2-3 volte; il tempo viene impiegato per cercare il prezzo minimo. Ma grazie a questo ordino 2-3 pezzi per il test. Compro per revisioni e consulenze con produttori che acquistano componenti in Cina.
Nel giugno 2016, la scelta ottimale è stata il modulo universale basato su XL4015, il cui prezzo era di 110 rubli con consegna gratuita. Le sue caratteristiche sono adatte per il collegamento di LED ad alta potenza fino a 100 Watt.



 Circuito in modalità driver.
Circuito in modalità driver.
Nella versione standard, il case dell'XL4015 è saldato su una scheda che funge da dissipatore di calore. Per migliorare il raffreddamento, è necessario installare un radiatore sul case XL4015. La maggior parte delle persone lo mette in cima, ma l'efficienza di tale installazione è bassa. È meglio installare il sistema di raffreddamento nella parte inferiore della scheda, di fronte al punto in cui è saldato il microcircuito. Idealmente, è meglio dissaldarlo e posizionarlo su un radiatore a tutti gli effetti utilizzando la pasta termica. Molto probabilmente le gambe dovranno essere estese con dei fili. Se il controller richiede un raffreddamento così serio, ne avrà bisogno anche il diodo Schottky. Dovrà essere posizionato anche sul radiatore. Questa modifica aumenterà notevolmente l'affidabilità dell'intero circuito.
In generale i moduli non sono dotati di protezione contro un'alimentazione errata. Questo li disabilita immediatamente, fai attenzione.

LM317

L'applicazione (a rotazione) non richiede nemmeno alcuna competenza o conoscenza di elettronica. Il numero di elementi esterni nei circuiti è minimo, quindi questa è un'opzione conveniente per chiunque. Il suo prezzo è molto basso, le sue capacità e applicazioni sono state testate e verificate molte volte. Richiede solo un buon raffreddamento, questo è il suo principale svantaggio. L'unica cosa di cui dovresti diffidare sono i microcircuiti cinesi LM317 di bassa qualità, che hanno parametri peggiori.
A causa dell'assenza di rumore in eccesso in uscita, sono stati utilizzati microcircuiti di stabilizzazione lineare per alimentare DAC Hi-Fi e Hi-End di alta qualità. Per i DAC, la purezza dell'energia gioca un ruolo enorme, quindi alcuni usano le batterie per questo.

La potenza massima per l'LM317 è 1,5 A. Per aumentare il numero di ampere, è possibile aggiungere al circuito un transistor ad effetto di campo o uno normale. L'uscita può arrivare fino a 10 A, impostata tramite resistenza a bassa resistenza. In questo diagramma, il transistor KT825 assume il carico principale.
Un altro modo è installare un analogo con caratteristiche tecniche più elevate su un sistema di raffreddamento più grande.
Stabilizzatore di corrente regolabile

Come radioamatore con 20 anni di esperienza, sono soddisfatto della gamma di blocchi e moduli già pronti venduti. Ora puoi assemblare qualsiasi dispositivo da blocchi già pronti in un tempo minimo.
Ho iniziato a perdere fiducia nei prodotti cinesi dopo aver visto in "Tank Biathlon" come è caduta la ruota del miglior carro armato cinese.
I negozi online cinesi sono diventati leader nella gamma di alimentatori, convertitori di corrente CC-CC e driver. Hanno quasi tutti i moduli disponibili per la vendita gratuita; se guardi più attentamente, puoi trovarne anche di molto altamente specializzati. Ad esempio, per 10.000 rubli puoi assemblare uno spettrometro del valore di 100.000 rubli. Dove il 90% del prezzo è un margine per il marchio e un software cinese leggermente modificato.
Il prezzo parte da 35 rubli. per un convertitore di tensione CC-CC, il driver è più costoso e dispone di due o tre resistori di regolazione invece di uno.

Per un utilizzo più versatile, è meglio un driver regolabile. La differenza principale è l'installazione di un resistore variabile nel circuito che imposta gli ampere di uscita. Queste caratteristiche possono essere indicate negli schemi di collegamento tipici nelle specifiche del microcircuito, scheda tecnica, scheda tecnica.


I punti deboli di tali driver sono il riscaldamento dell'induttore e del diodo Schottky. A seconda del modello di controller PWM, possono sopportare da 1 A a 3 A senza ulteriore raffreddamento del chip. Se superiore a 3 A, è necessario il raffreddamento del PWM e un potente diodo Schottky. Lo starter viene riavvolto con un filo più spesso o sostituito con uno adatto.
L'efficienza dipende dalla modalità operativa e dalla differenza di tensione tra ingresso e uscita. Maggiore è l'efficienza, minore è il riscaldamento dello stabilizzatore.
Prezzi in Cina
Il costo è molto contenuto, considerando che la consegna è inclusa nel prezzo. Pensavo che a causa di un prodotto che costa 30-50 rubli, i cinesi non si sporcherebbero nemmeno; è molto lavoro per un reddito basso. Ma come ha dimostrato la pratica, mi sbagliavo. Raccolgono tutte le sciocchezze economiche e le spediscono. Arriva nel 98% dei casi, e acquisto su Aliexpress da più di 7 anni e per somme ingenti, probabilmente già circa 1 milione di rubli.
Pertanto effettuo un ordine in anticipo, di solito 2-3 pezzi con lo stesso nome. Vendo quello che non mi serve sul forum locale o su Avito, tutto va a ruba.


Il principio della modellazione della larghezza di impulso (PWM) è noto da molto tempo, ma ha iniziato ad essere utilizzato in vari circuiti relativamente di recente. È un punto chiave per il funzionamento di molti dispositivi utilizzati in vari campi: gruppi di continuità di varie potenze, convertitori di frequenza, sistemi di controllo di tensione, corrente o velocità, convertitori di frequenza da laboratorio, ecc. Si è dimostrato eccellente nell'industria automobilistica e nella produzione come elemento per il controllo del funzionamento sia di servizi che di potenti motori elettrici. Il regolatore PWM si è dimostrato efficace lavorando in vari circuiti.
Vediamo alcuni esempi pratici che mostrano come regolare la velocità di rotazione di un motore elettrico utilizzando circuiti elettronici che includono un controller PWM. Supponiamo che tu debba modificare la velocità del motore elettrico nel sistema di riscaldamento della tua auto. Un miglioramento piuttosto utile, non è vero? Soprattutto in bassa stagione, quando si desidera regolare la temperatura in cabina senza intoppi. Il motore DC installato in questo sistema consente di modificare la velocità, ma è necessario influenzarne l'EMF. Con l'aiuto di moderni elementi elettronici questo compito può essere facilmente realizzato. Per fare ciò, nel motore viene acceso un potente transistor ad effetto di campo. È controllato, come avrai intuito, PWM. Con il suo aiuto, puoi modificare la velocità del motore elettrico entro un ampio intervallo.

Come funziona un regolatore PWM nei circuiti In questo caso viene utilizzato uno schema di controllo leggermente diverso, ma il principio di funzionamento rimane lo stesso. Ad esempio, possiamo considerare il funzionamento di un convertitore di frequenza. Tali dispositivi sono ampiamente utilizzati nella produzione per regolare la velocità dei motori. Per cominciare, la tensione trifase viene raddrizzata utilizzando un ponte Larionov e parzialmente livellata. E solo dopo viene alimentato a un potente gruppo o modulo bipolare basato su transistor ad effetto di campo. È controllato da un dispositivo basato su microcontrollore. Genera impulsi di controllo, la loro ampiezza e frequenza necessarie per generare una determinata velocità del motore elettrico.

Sfortunatamente, oltre alle buone caratteristiche prestazionali, i circuiti che utilizzano un controller PWM di solito presentano un forte rumore nel circuito di alimentazione. Ciò è dovuto alla presenza di induttanza negli avvolgimenti dei motori elettrici e nella linea stessa. Combattono questo problema con un'ampia varietà di soluzioni circuitali: installa potenti dispositivi di protezione da sovratensione nei circuiti CA o installa un diodo a ruota libera in parallelo al motore nei circuiti di alimentazione CC.
Tali circuiti sono caratterizzati da un'affidabilità operativa piuttosto elevata e sono innovativi nel campo del controllo di azionamenti elettrici di varia potenza. Sono abbastanza compatti e ben controllati. Le ultime modifiche di tali dispositivi sono ampiamente utilizzate nella produzione.